PathBench: Benchmarking Platform for Classic and Learned Path Pl
Hussein Ali Jaafar
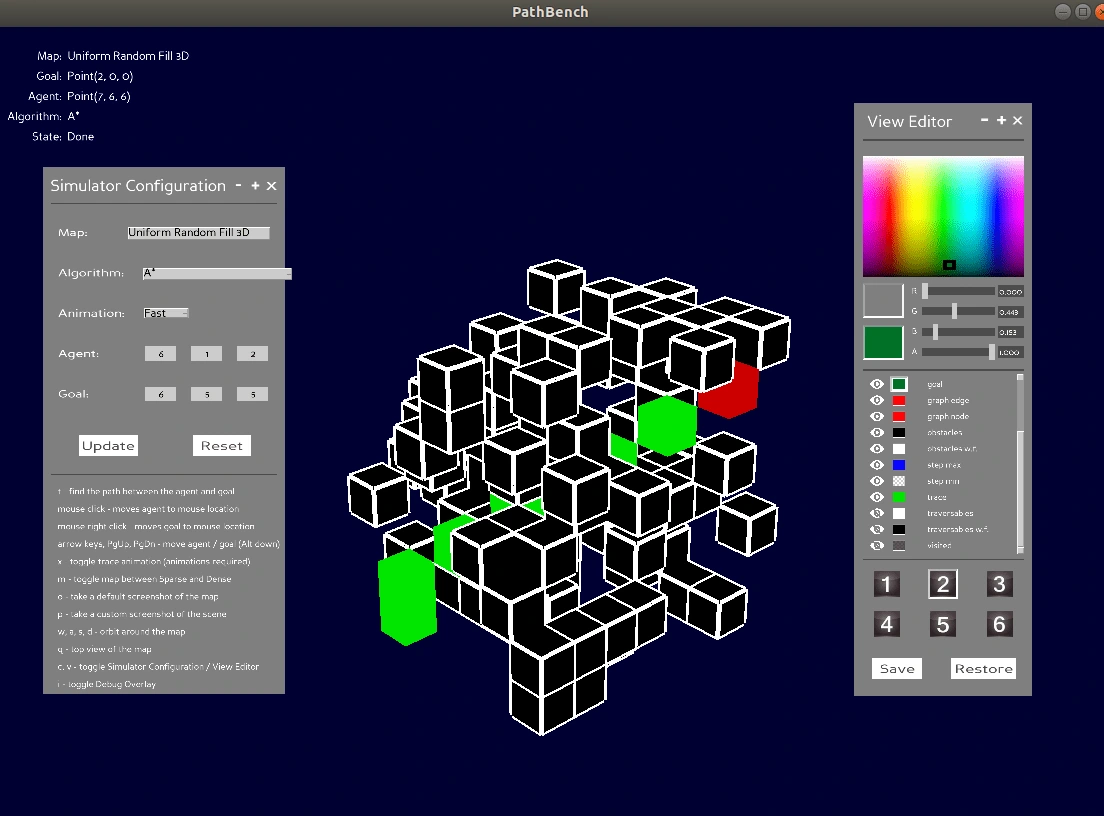
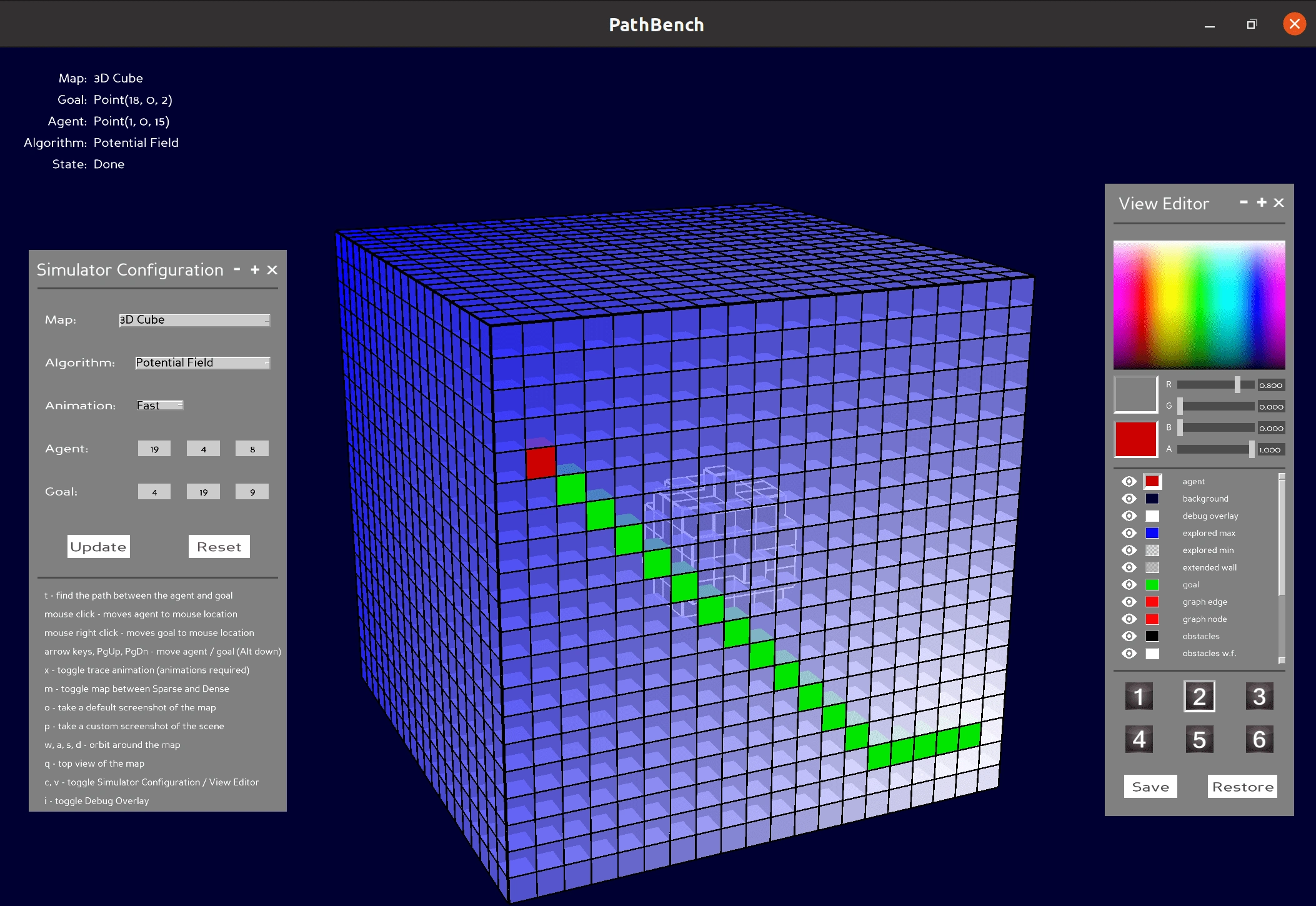
PathBench is a motion planning platform used to develop, assess, compare and visualise the performance and behaviour of both classic and machine learning-based robot path planners in a two- or three-dimensional space.
Built with Python, PyTorch and linked to several open-source libraries.
Like this project
Posted Jul 7, 2024
PathBench is an open source platform for developing, visualizing, training, testing, and benchmarking of robotic path planners.
Likes
0
Views
4