Hussein Ali Jaafar - Project Manager | Contra
Work by Hussein Ali Jaafar
Sign Up
Post a job
Sign Up
Log In
Hussein Ali Jaafar
Solving Complex Problems with Advanced Algorithms
Message
Follow
Ready for work
Hussein Ali is ready for their next project!
Toronto, Canada
Work
Services
About
Toronto, Canada
0
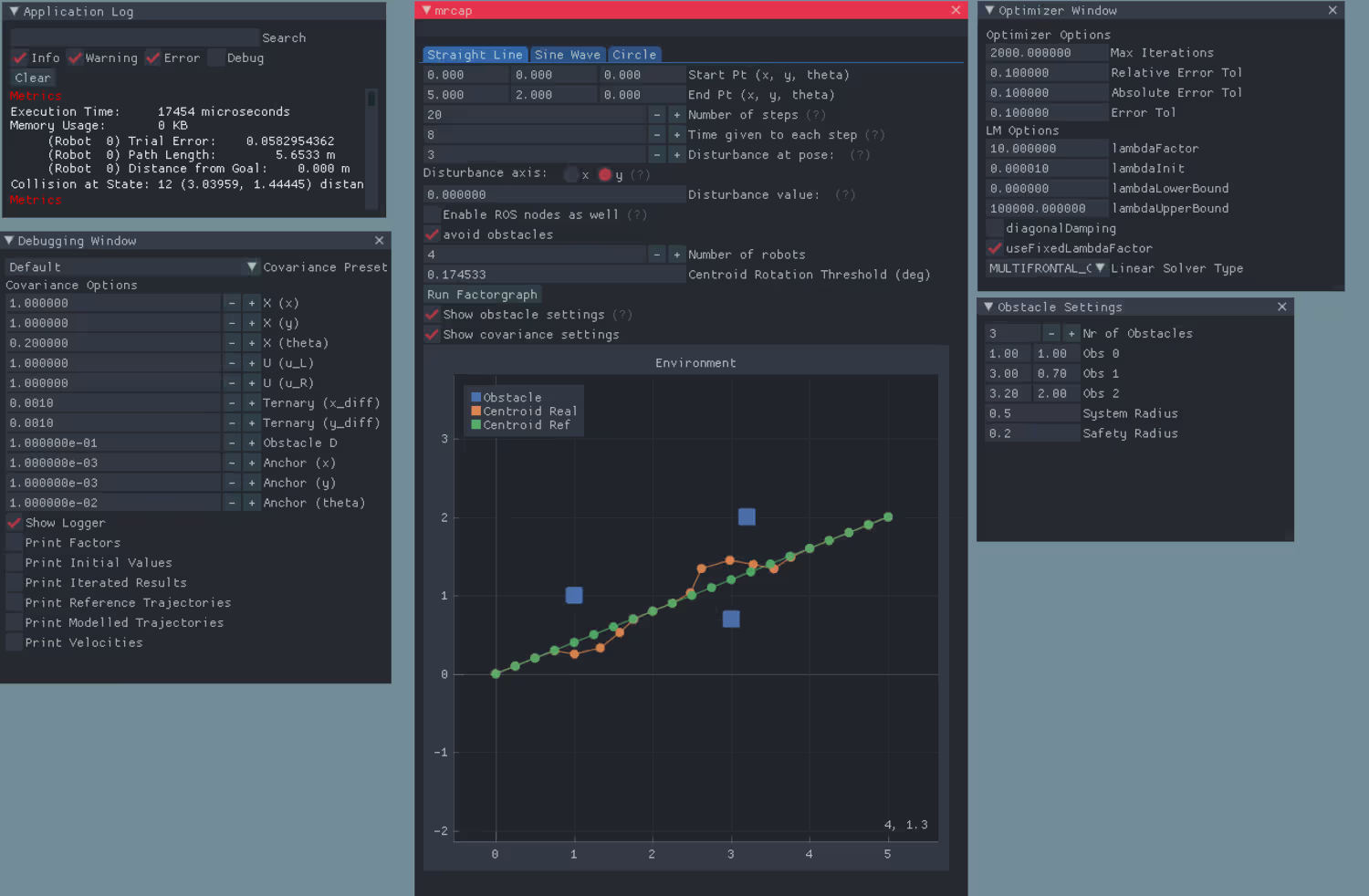
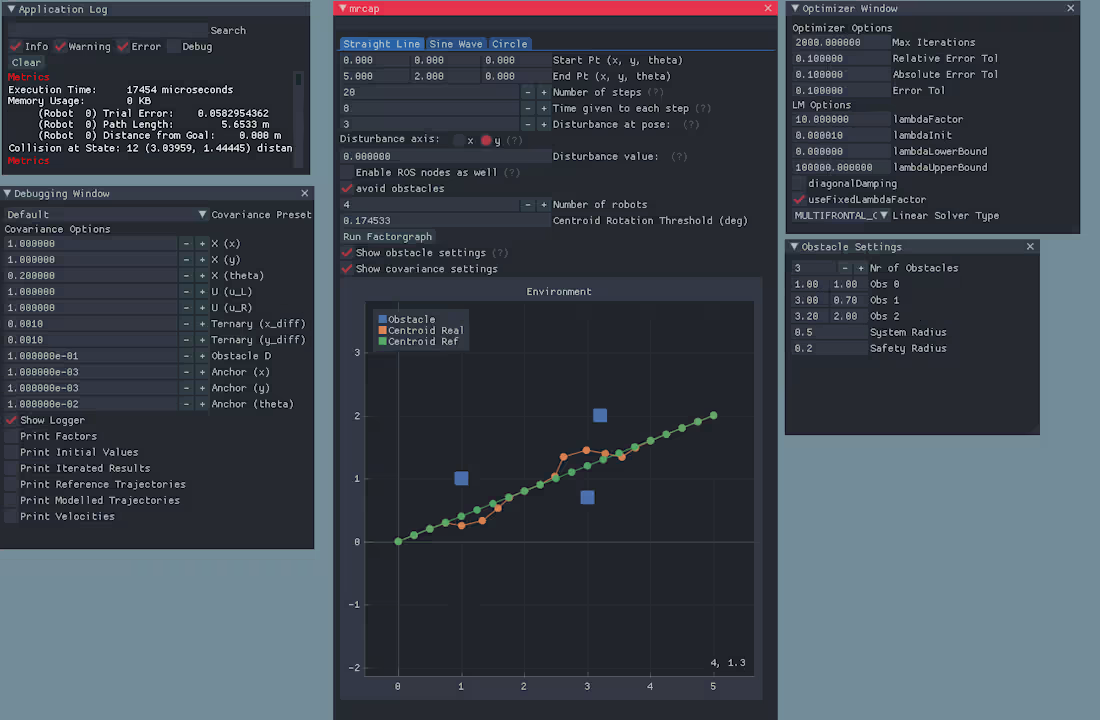
MR.CAP: Multi-robot Joint Control and Planning for Object Transp
0
21
0
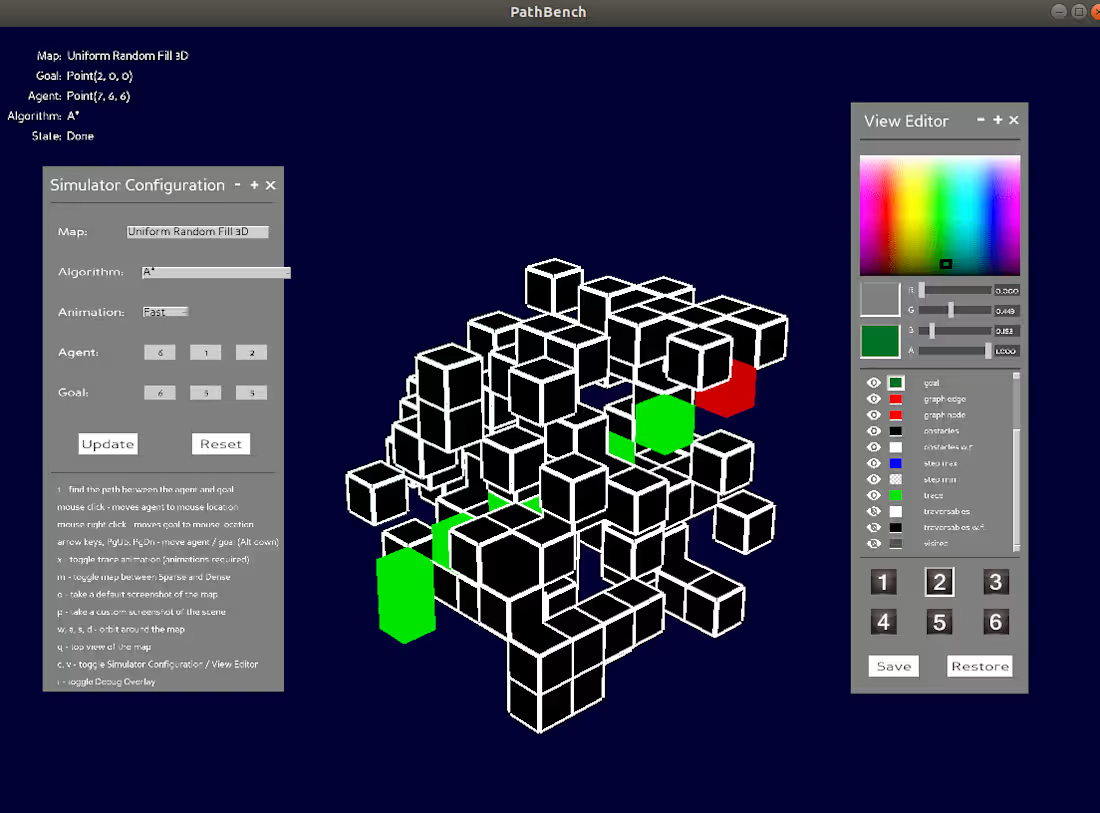
PathBench: Benchmarking Platform for Classic and Learned Path Pl
0
4
0
Terrain Following and Obstacle Avoidance
0
7
0
Waypoint Planning Networks
0
1
Challenges
Flowstep Challenge
easylenscontra
rivebroadcastchallenge
Challenges
Flowstep Challenge
easylenscontra
rivebroadcastchallenge