Autonomous Robotic Imaging System Development
Erhan Namlı
The Challenge
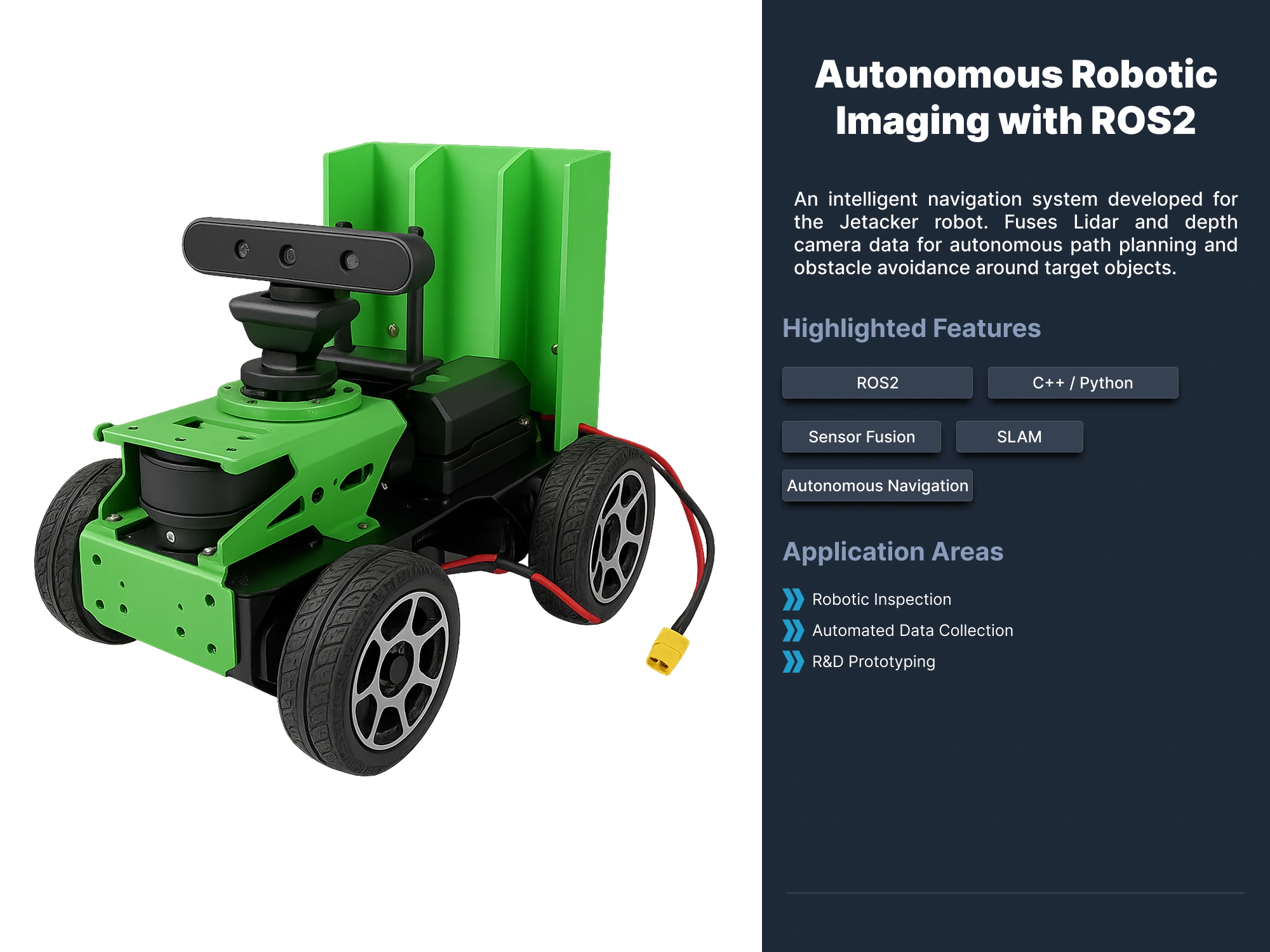
The goal of this R&D project was to develop a fully autonomous robotic system capable of navigating complex environments and performing precise, automated imaging tasks. The primary challenge was to enable a mobile robot to intelligently map its surroundings, identify a target object (e.g., a vehicle), and execute a pre-defined path around it to capture images from optimal angles, all while dynamically avoiding obstacles.:
Solution: I engineered a sophisticated software stack using the Robot Operating System (ROS2) to bring intelligent autonomy to the HiWonder Jetacker robot. My solution was built on three core pillars:
Advanced Perception & Sensor Fusion: I fused data from a YDLidar G4 for 2D environmental mapping and an Orbbec3D Astra depth camera for 3D obstacle detection. This allowed the robot to build a rich, real-time understanding of its environment, reliably distinguishing between static obstacles and the target object.
Intelligent Navigation & Path Planning: Using the ROS2 Navigation Stack, I implemented robust algorithms for SLAM (Simultaneous Localization and Mapping) and dynamic obstacle avoidance. The robot could autonomously create a map of an unknown area and navigate it safely.
Custom Application Logic: I developed a custom C++/Python node that defined the robot's primary mission. This algorithm enabled the robot to:
Identify the target vehicle within its mapped environment
Calculate a precise geometric path (e.g., a circle or rectangle) around the vehicle
Execute the path while triggering the camera at specific waypoints to ensure optimal image capture
Technical Highlights
Framework: ROS2 (Robot Operating System)
Languages: C++, Python
Key Concepts: Sensor Fusion, SLAM, Autonomous Navigation, Obstacle Avoidance
Hardware: HiWonder Jetacker, YDLidar G4, Orbbec3D Astra Depth Camera
Libraries: ROS2 Navigation Stack, OpenCV
Project Outcome I successfully developed and demonstrated a fully autonomous robotic system. The robot could reliably map its environment, detect target objects, and execute complex imaging patterns with high precision and adaptability. This project served as a successful proof-of-concept for automated robotic inspection and data collection, showcasing my deep expertise in ROS2, sensor fusion, and the development of intelligent robotic behaviors.
Like this project
Posted Jul 24, 2025
Developed an autonomous robotic system for precise imaging tasks using ROS2.
Likes
0
Views
12