
Scott McLeslie
Robotics, automations. System architecture. PCB design.
- $1k+
- Earned
- 1x
- Hired
- 5.00
- Rating
- 4
- Followers

From red and blue traces on a screen to a fully fabricated PCB - the hardware design process is always exciting. But the greatest reward is seeing the final product in action. Hearing scientists use my boards alongside their high-grade lab equipment makes all the hard work completely worthwhile.
2
5
230
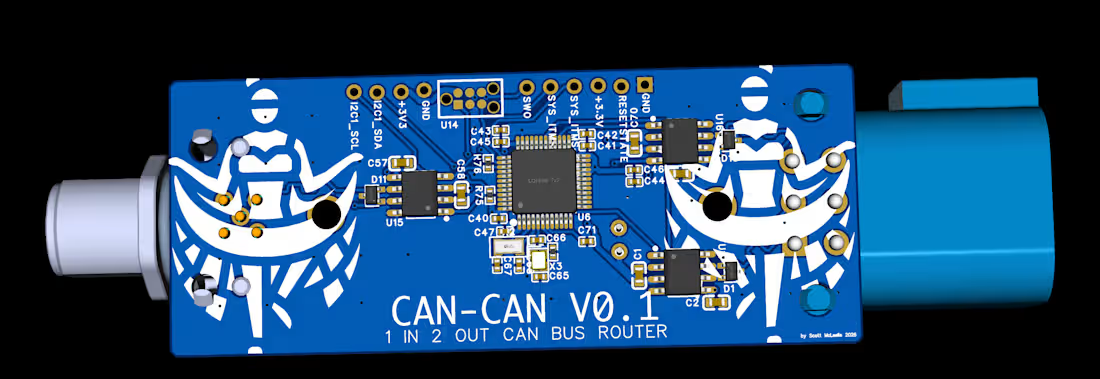
Inline 1 to 2 CAN Bus router.
Self contained, inline potted router flashed for a specific piece of hardware translating abstracted message to hardware specific messages and signals.
1
92
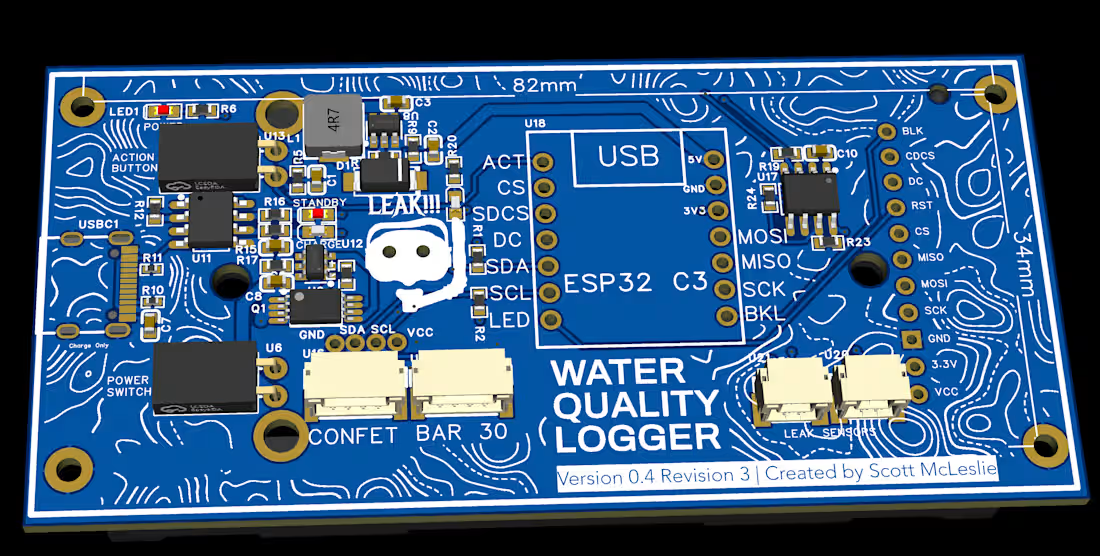
Water quality logger for divers
1
158
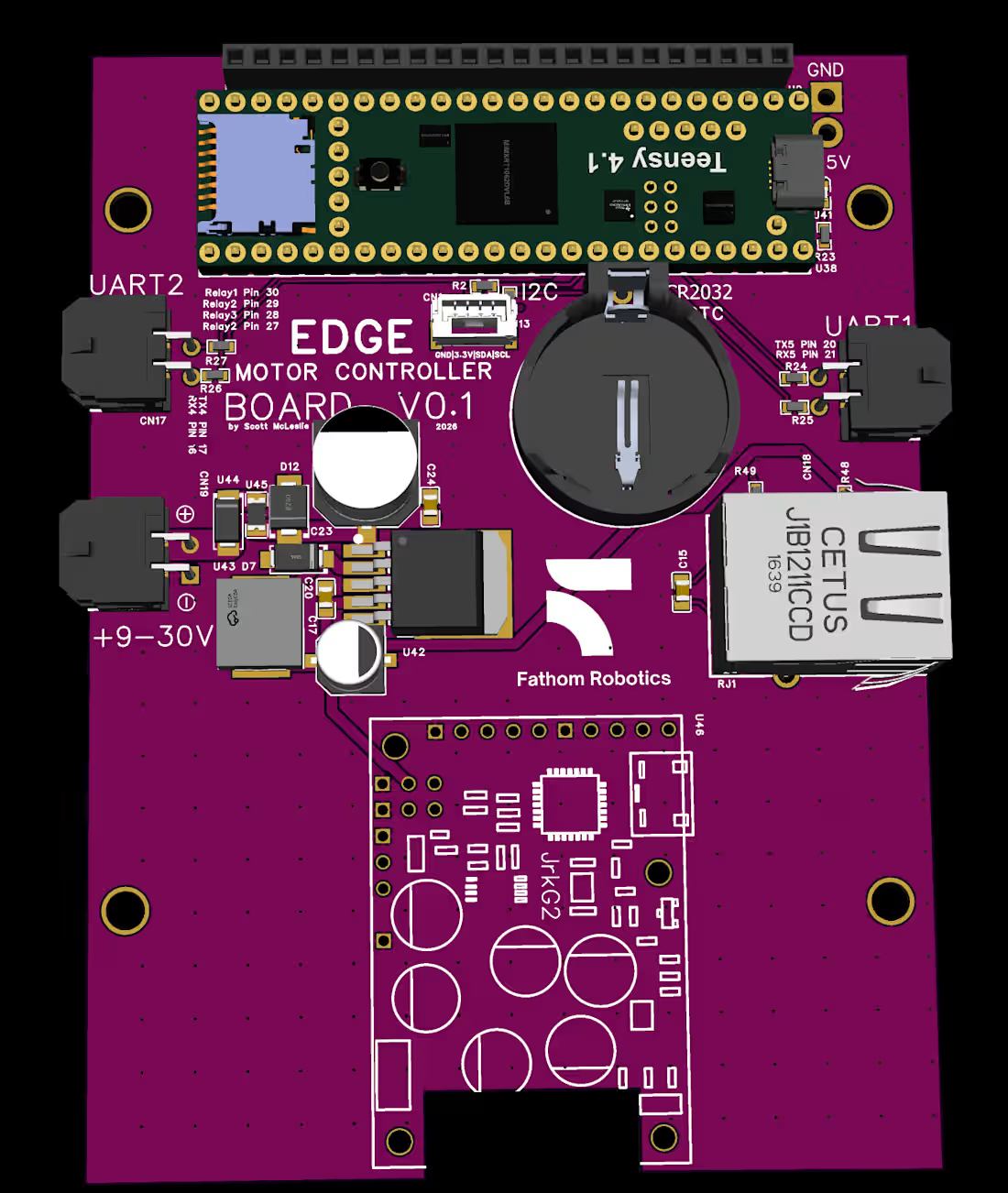
The CANaBUS ADC Carrier is a specialized ROS2 edge board designed as an Ethernet and UART carrier for the Jrk G2 18v27 USB Motor Controller. Powered by the Teensy 4.1, it provides high-speed processing and seamless integration for closed-loop motor control with feedback.
🛠️ Key Technical Features
Controller Interface: Specifically designed to host and communicate with the Jrk G2 18v27 via dedicated UART channels (UART1/UART2) for precise motor commands.
Ethernet Connectivity: Integrated RJ45 MagJack (J1B1211CCD) provides native 10/100 Mbps Ethernet for high-reliability ROS2 data streaming.
4-Channel ADC: Features four dedicated analog-to-digital converter channels accessible via Teensy pins, ideal for monitoring real-time sensor feedback or voltage differentials.
1
206
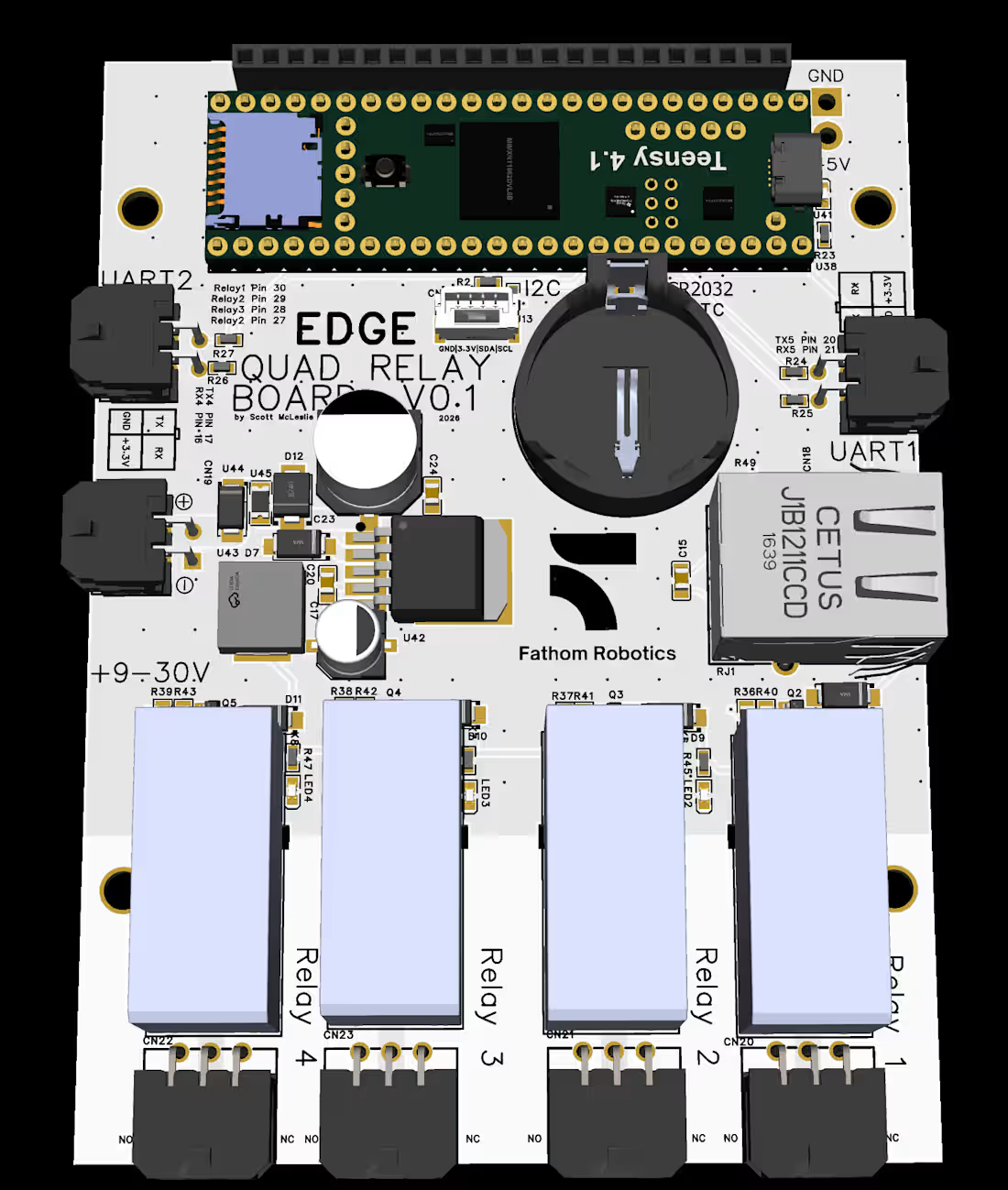
CANaBUS Mini Relay: ROS2 Edge Controller
The CANaBUS Mini Relay is a compact, high-performance edge board powered by a Teensy 4.1. Designed for industrial ROS2 applications, it combines high-speed networking with robust load switching.
🛠️ Core Capabilities
Quad Relay Output: 4x HF115F relays driven by AO3400 MOSFETs for controlling high-voltage devices via differential switching.
Ethernet Connectivity: Integrated RJ45 MagJack for native high-speed ROS2 communication.
4x Analog Inputs (ADC): Utilizes available Teensy 4.1 pins to provide 4 ADC channels, essential for validating voltage differentials or sensor feedback in control loops.
Industrial Power: Wide +9V to +30V DC input with LM2596S-5.0 buck regulation and TVS surge protection.
1
182
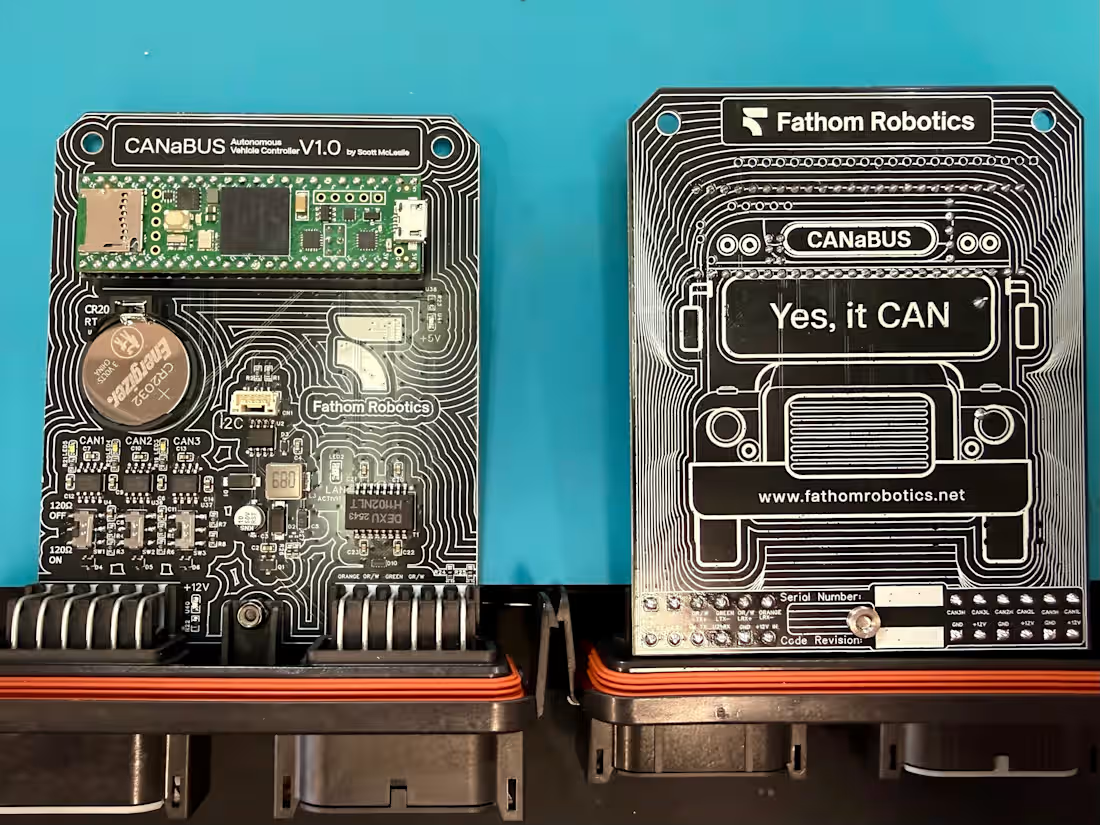
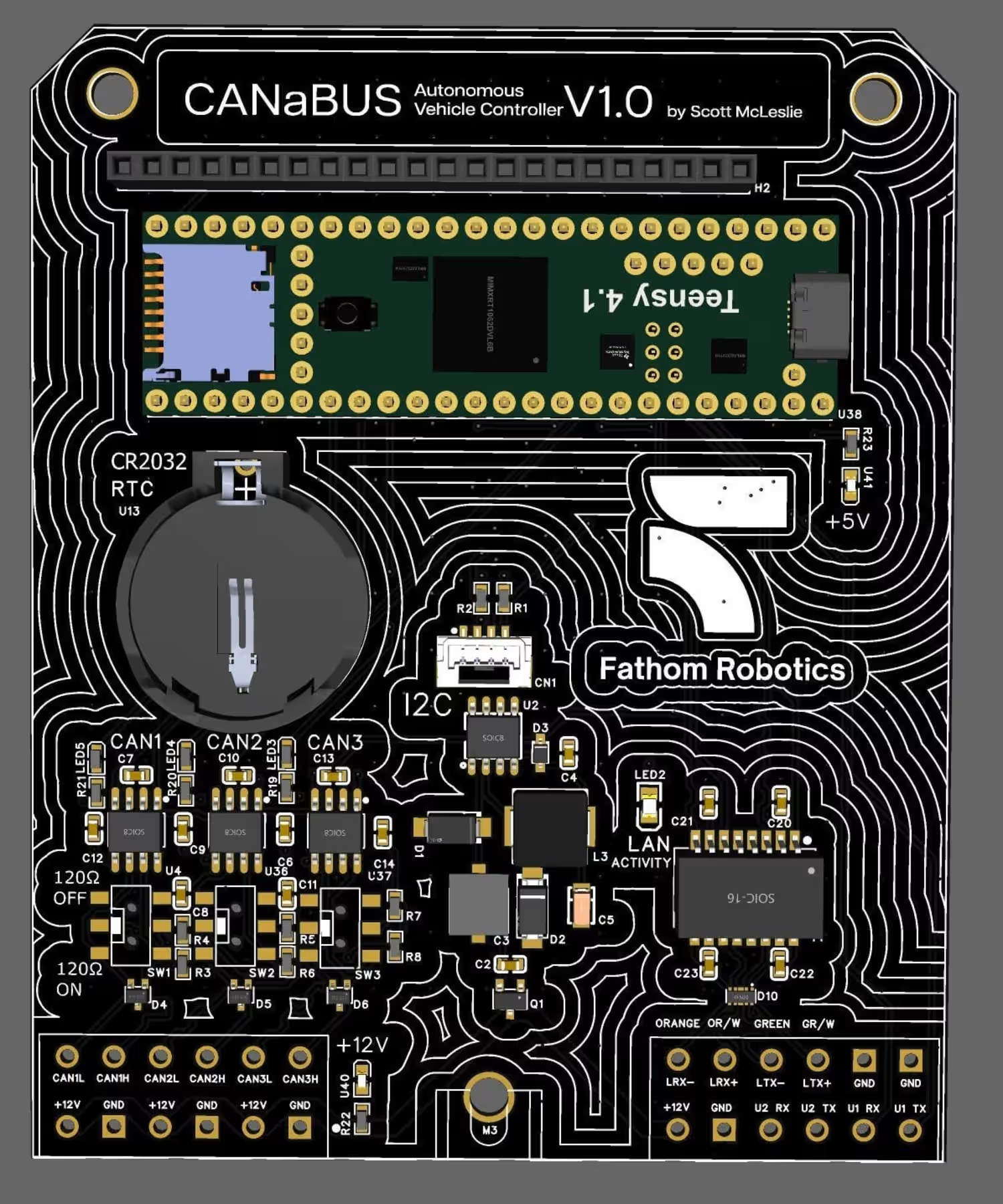
CANaBUS Mini: The Universal Marine Controller ⚓
The CANaBUS Mini is a professional-grade bridge that transforms conventional vessels into autonomous USVs. Housed in a rugged IP67 enclosure, it connects legacy marine electronics to modern autonomy stacks like ROS2 and ArduPilot.
The Highlights:
System Translator: Bridges marine CAN bus systems with Ethernet and Serial.
Total Control: Manages engines, steering, and trim tabs via triple CAN interfaces.
Real-Time Power: Built on Teensy 4.1 for high-speed, deterministic processing.
Industrial Build: Waterproof, dust-tight, and ready for harsh sea conditions.
The essential link for reliable, industrial-strength unmanned maritime operations.
1
201
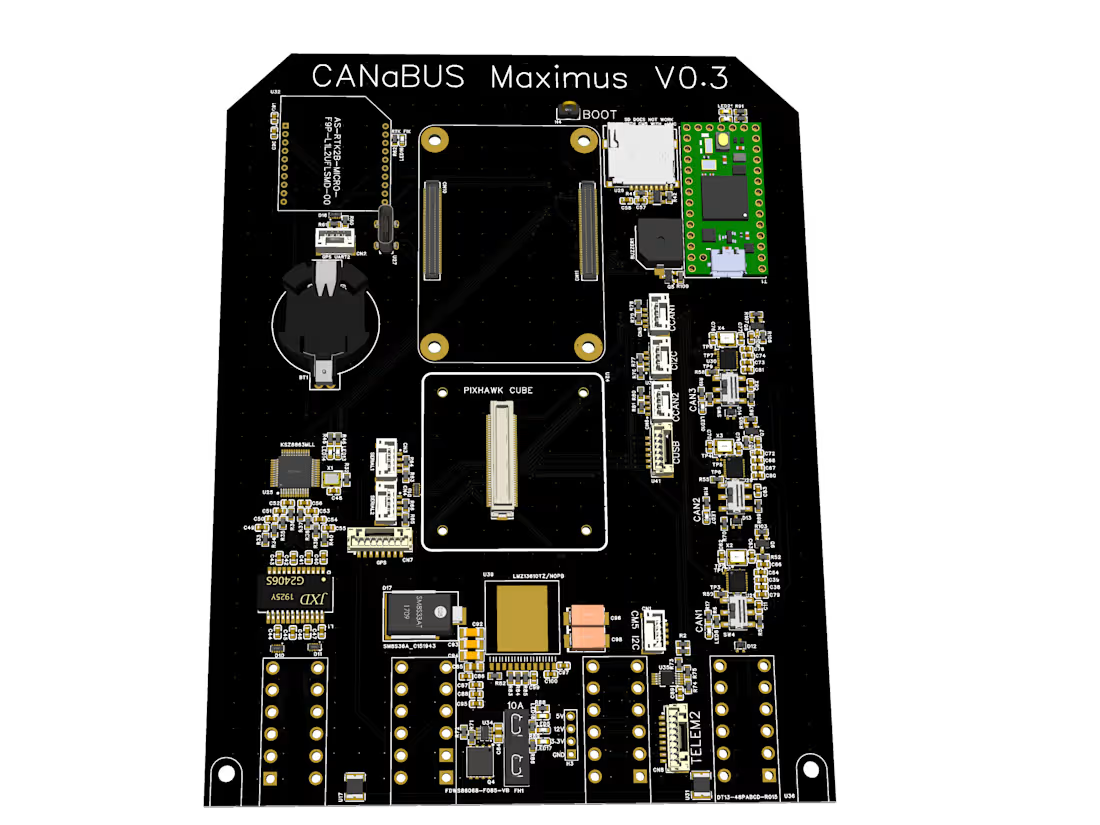
Maximus: The Marine Autonomy Engine 🌊
Maximus is an enterprise-grade platform that packs an entire USV autonomy stack into one rugged, IP67 enclosure. It integrates a Raspberry Pi CM5, PixHawk Cube autopilot, and RTK GPS to eliminate multi-device complexity.
Key Highlights:
All-In-One: Replaces three devices with one high-performance board.
Pro Precision: u-blox F9P delivers centimeter-level RTK accuracy.
Marine-Ready: Triple CAN bus and Gigabit Ethernet for engine and sensor fusion.
Flexible: Native support for ROS2, ArduPilot, and turnkey web interfaces.
Streamline your marine robotics with production-ready simplicity.
1
193