StylerCV
Shiki Nobuhisa
Project involving usage of state-of-art algorithms to first create a coarse reconstruction of indoor environments and then using that coarse mesh to create a planar mesh that can then be used for BIM. This was created using either depth images from depth sensors, or depth images created by using Surface from Motion and Multivision Stereo pipelines on sets of images.
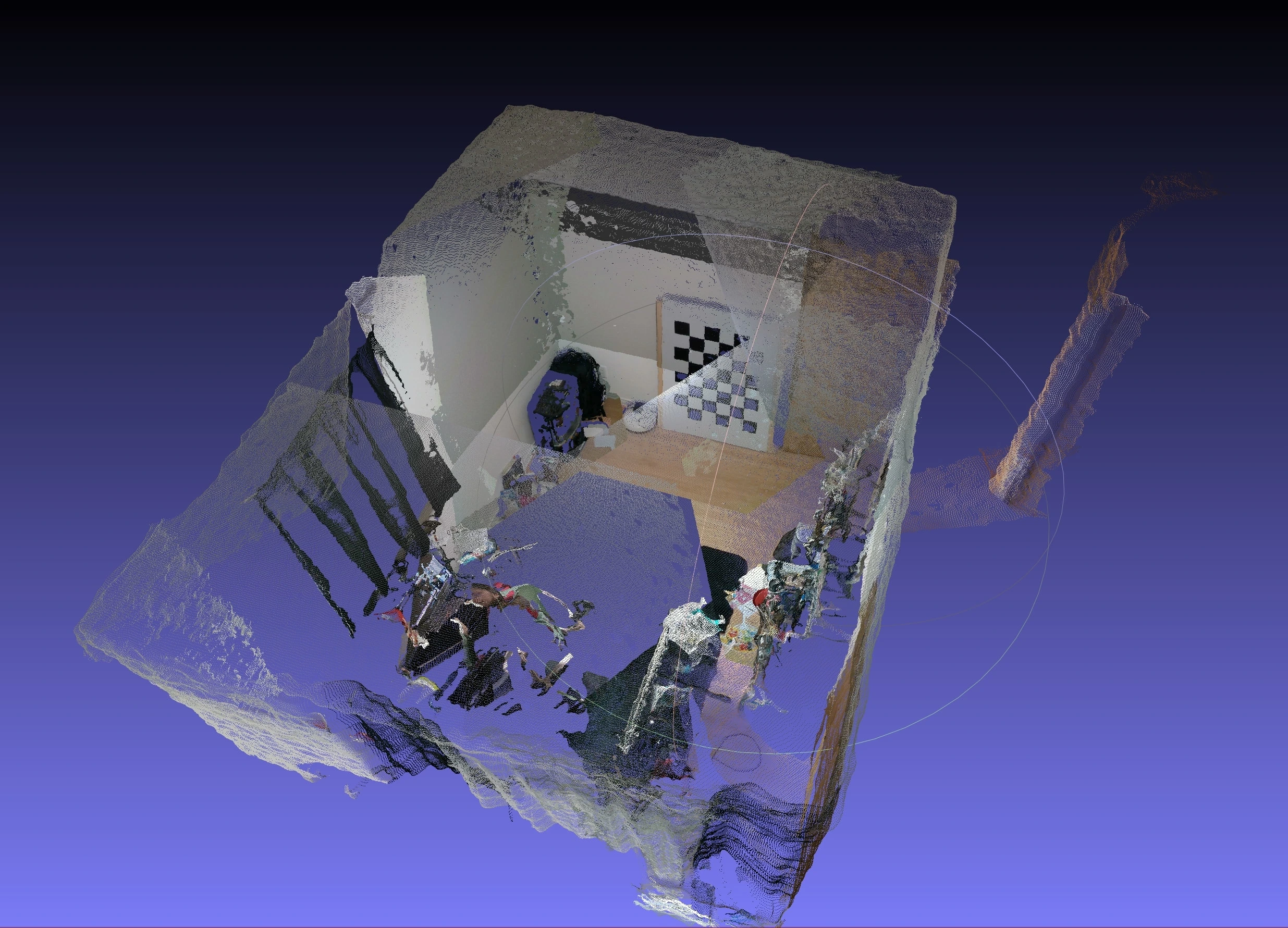
We start with panoramic Point Clouds of Rooms
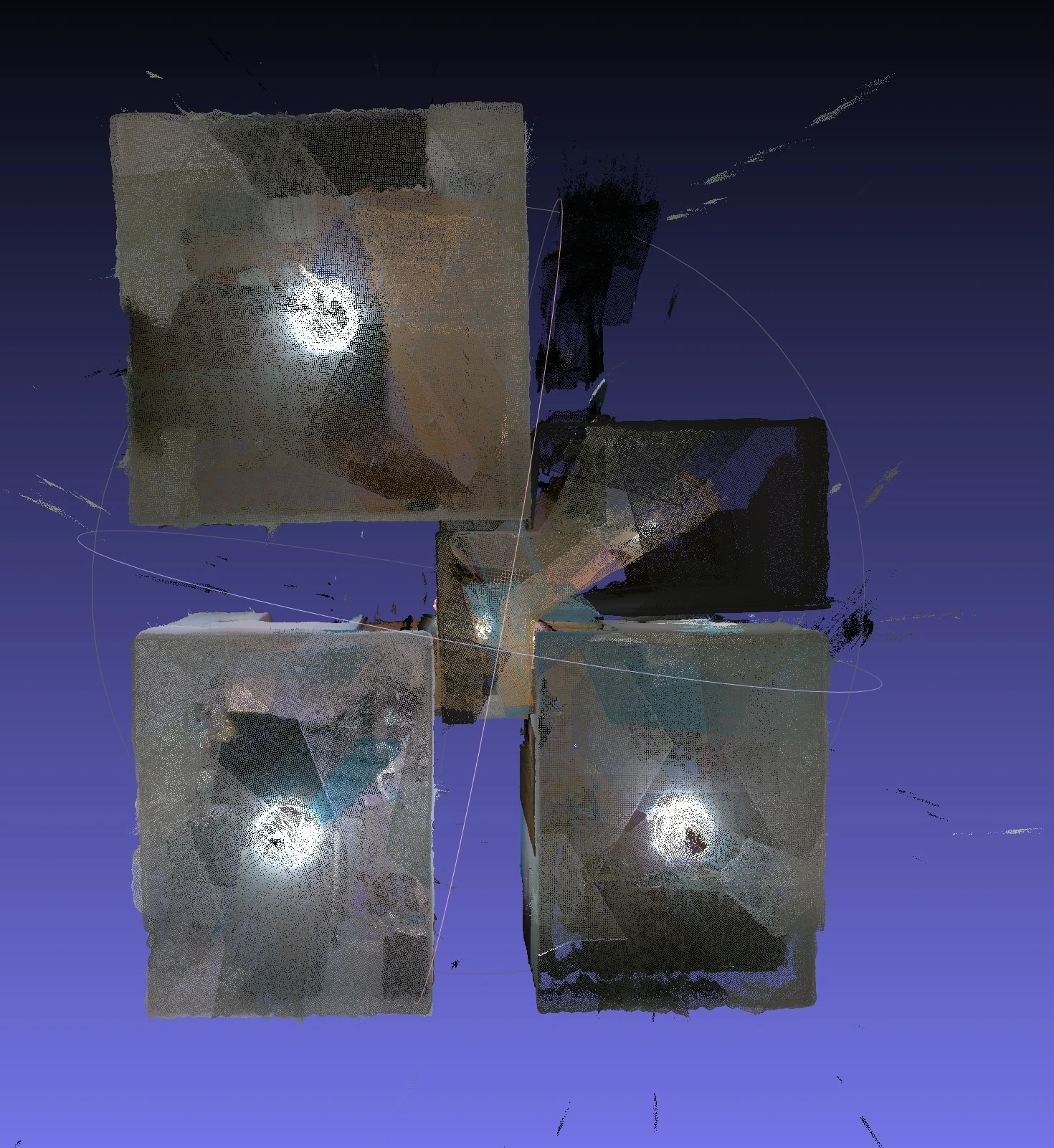
Register the different captures to get a full point cloud of the interior
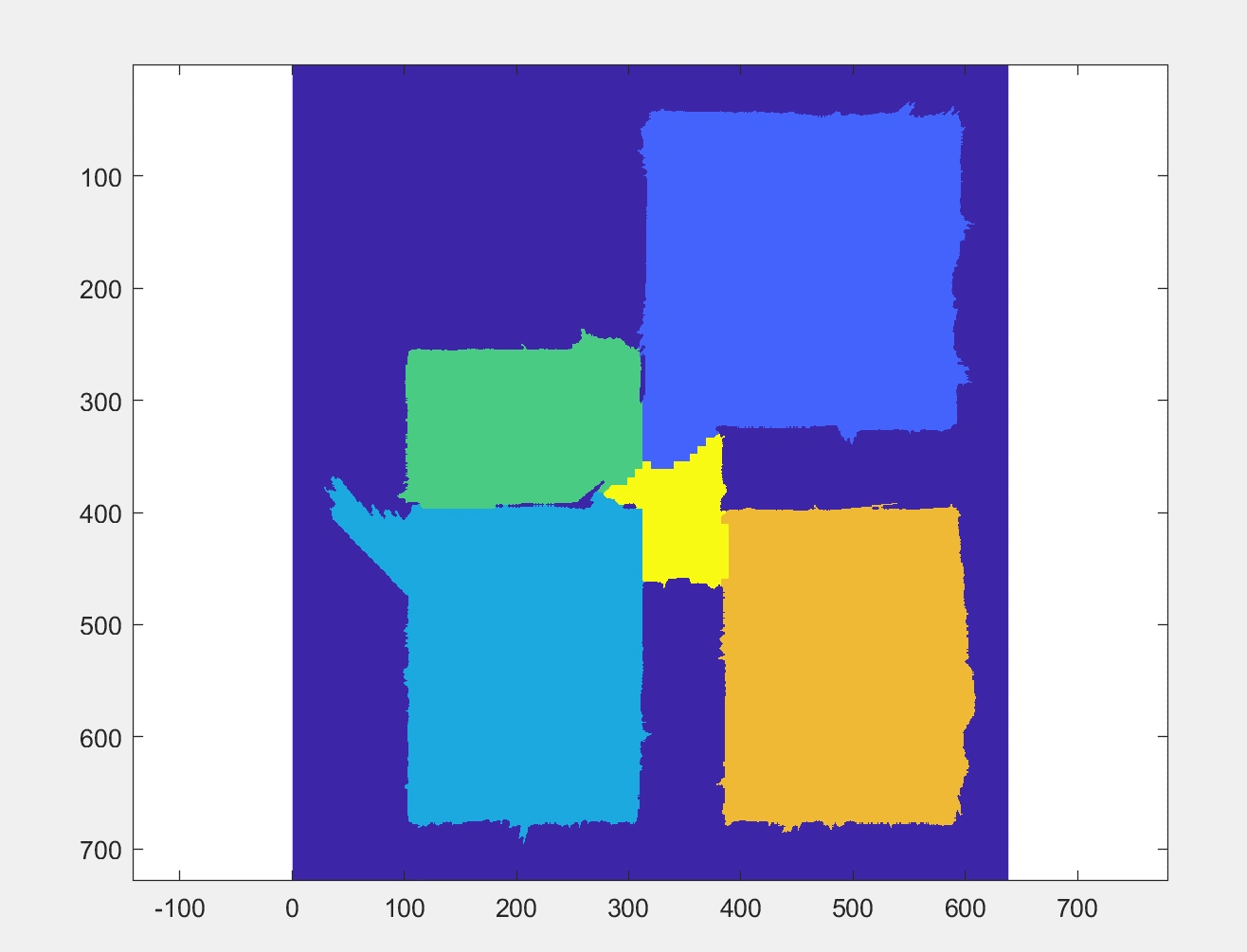
We analyze the data to get a coarse estimation of room segmentation
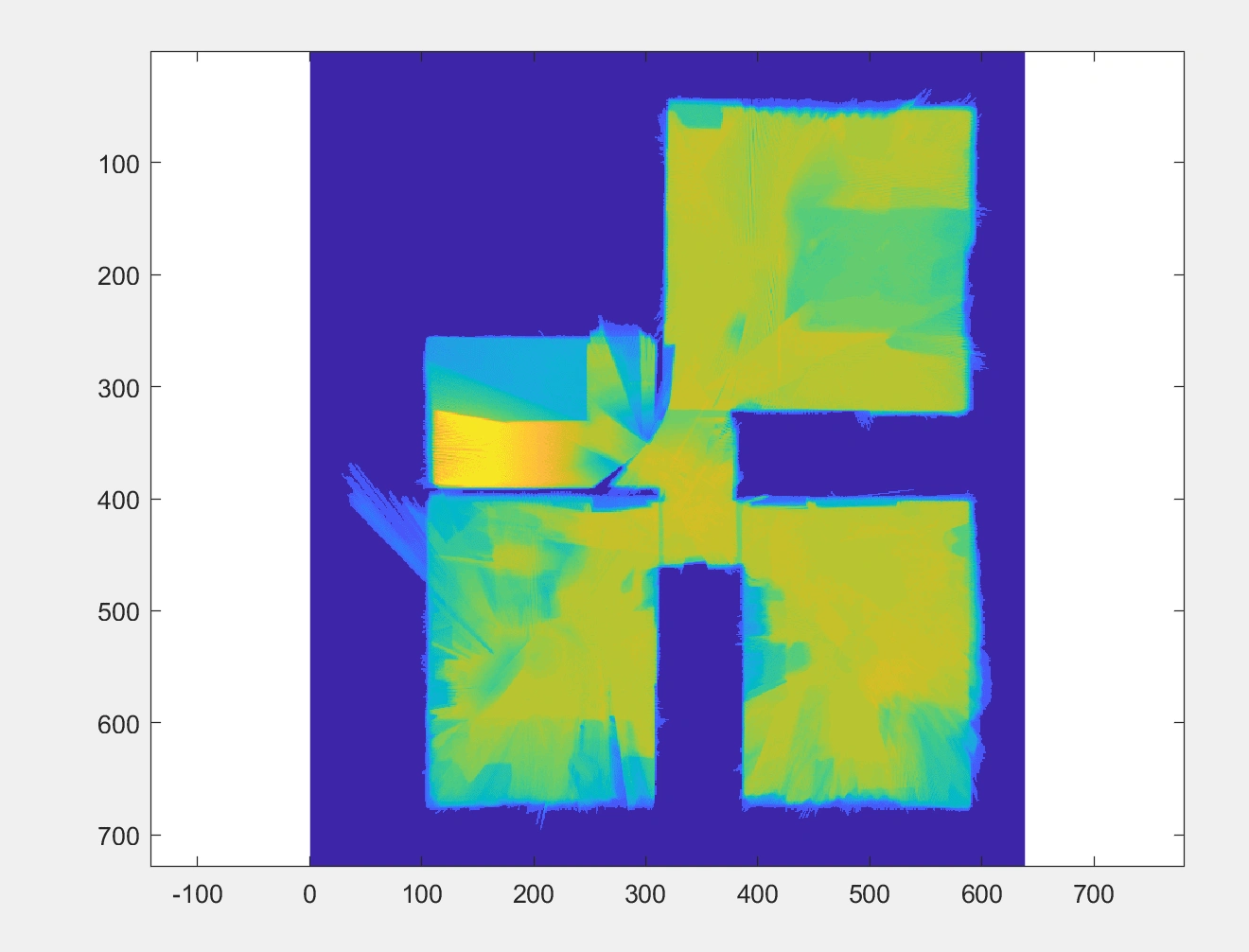
Use the "Free Space" between the camera and the point to understand where the walls start
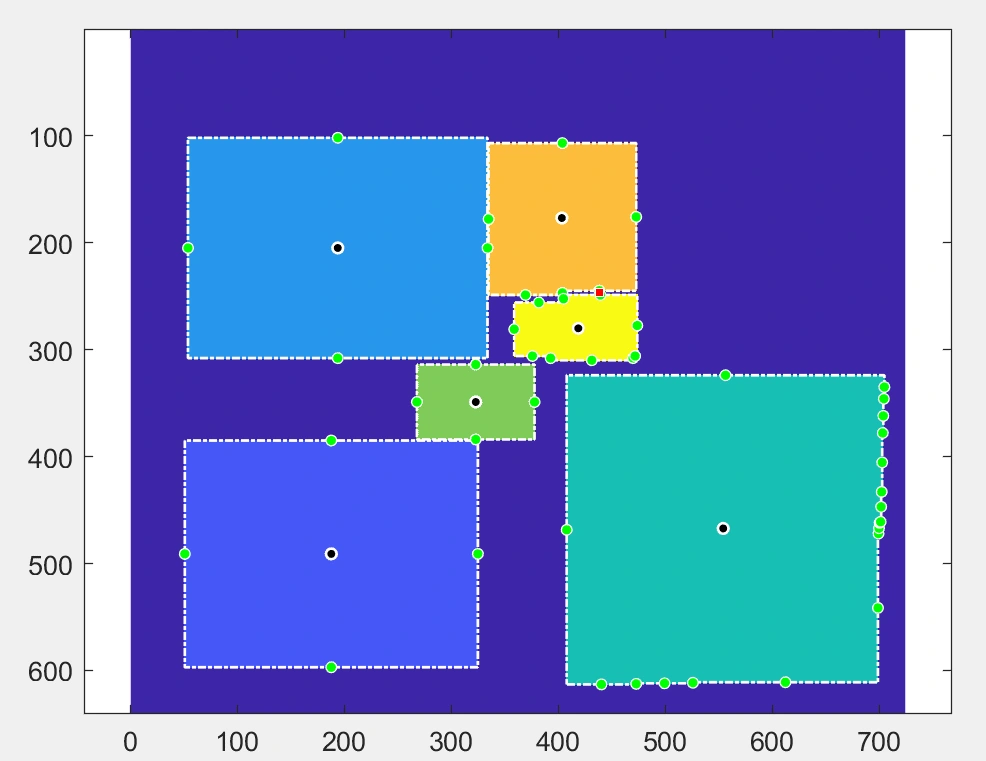
We use the previous data to make planar maps of the rooms
Like this project
Posted Jun 24, 2023
The project involved developing software to process the data captured by the sensors or cameras, and being able to create planar meshes and BIM.