Heavy Duty Rescue Robot
Halil İbrahim Kovancı
From Conceptual Hurdles to a Robust Platform
I started with a problematic robotic prototype and, working with PhD colleagues, identified major issues like underperforming motors, a chassis failing environmental tests, and unreliable leg positioning. I redesigned the chassis to be waterproof, rugged and silent, and recommended better equipment available in the market. This resulted in a high-performance robot now in use. Throughout the design, I constantly collaborated with PCB designers to ensure well thought integration of all components, creating a timeless configuration.

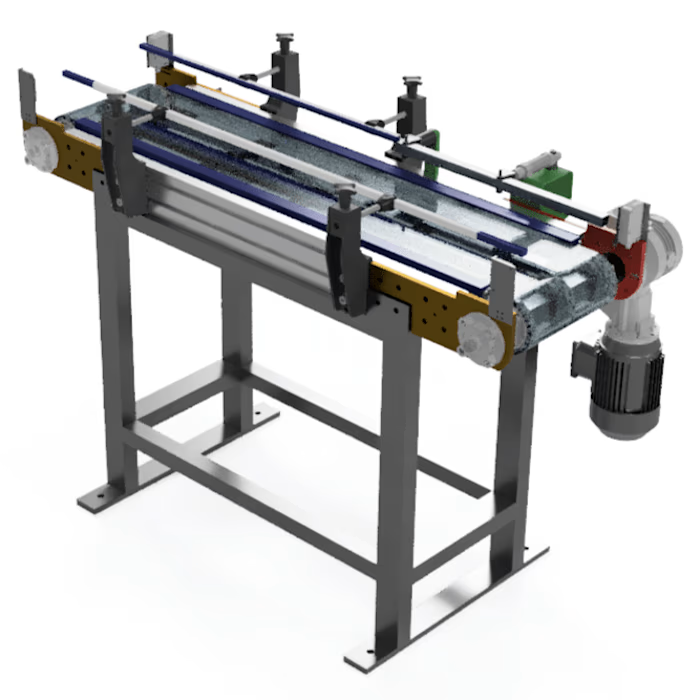
Test Chassis for new equipment
Enhancing Functionality and Resilience
In the 3D design phase, I utilized my deep knowledge of material properties to achieve remarkable improvements. I added soundproofing, enhanced heat dissipation, integrated night vision, and optimized antenna positioning. Despite reinforcing the legs to withstand falls from up to 2 meters and streamlining the user interface for faster and safer battery changes, I not only maintained but actually elevated the overall performance of the platform. These upgrades were achieved without compromising weight which is not an easy feat, proving that I successfully enhanced the robot’s capabilities and efficiency across the board.

Staircase capability testing with our contribution
Manufacturing:
Innovating Processes and Enhancing Communication
During the manufacturing phase, I introduced the company to three popular and well-known manufacturing techniques, providing initial examples that significantly enhanced our approach. Which led to a notable reduction in production time and costs while increasing the versatility of our product development. I also updated the manufacturing documents to improve communication between the company, designers, and manufacturers. Additionally, I created detailed yet streamlined assembly documents, ensuring future technicians, engineers and executives could thoroughly understand and execute the design.
Conclusion
This project demonstrated a comprehensive approach to robotic design and manufacturing, addressing key challenges and implementing advanced solutions. By overhauling the prototype, integrating cutting-edge techniques, and improving documentation, I delivered a high-performance, cost-effective solution that set a new standard for future projects. The results not only enhanced the robot's capabilities but also streamlined processes for ongoing and future development.

Render to Reality Large Chassis

Post River test Small Chassis
Like this project
Posted Sep 5, 2024
Rebirth a robotic prototype for improved performance and durability, introduced advanced manufacturing techniques, cutting costs and enhancing documentation.
Likes
0
Views
30