Apollo314/inverted-pendulum-on-a-wheel

Sefa Aslan



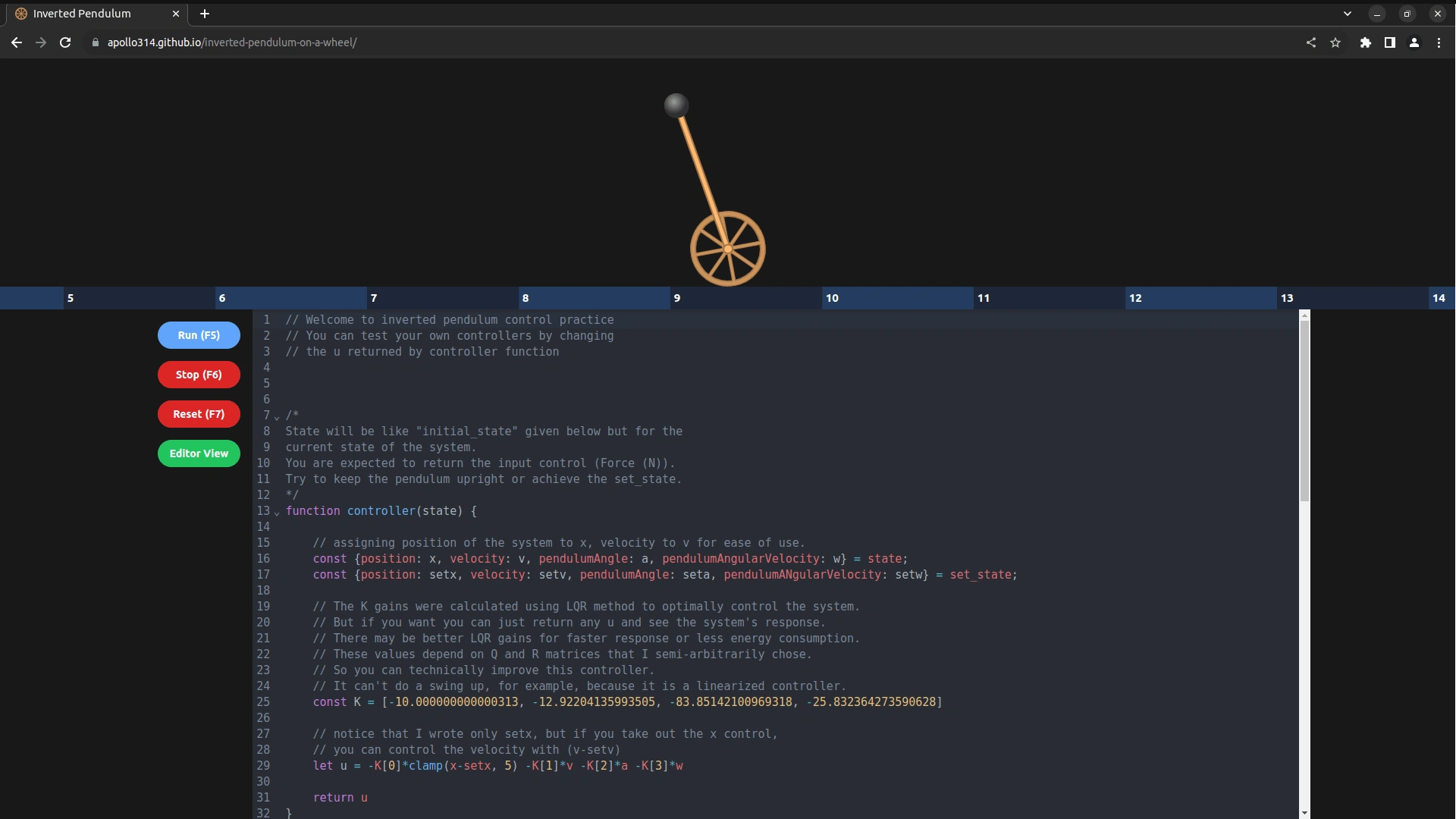
This is a nonlinear inverted pendulum simulation that visitors can change the controller in real time.
Here's a live demo: https://apollo314.github.io/inverted-pendulum-on-a-wheel/
Project Setup
npm install
Compile and Hot-Reload for Development
npm run dev
Type-Check, Compile and Minify for Production
npm run build
Lint with ESLint
npm run lint
System parameters
System parameters like mass of the wheel or the ball is located in lqr_gains_solver.py along with a linearized state space representation of the system.
Simulation
Simulation happens via Runge–Kutta–Fehlberg method or RK4(5) method. it runs about 60 times a second.
Inverted Pendulum On a Wheel
It is slightly different than an inverted pendulum on a cart because we also have a rotating wheel with inertia. but other than that, everything is pretty much the same.
Like this project
Posted Sep 1, 2023
A nonlinear simulation of an inverted pendulum. Contribute to Apollo314/inverted-pendulum-on-a-wheel development by creating an account on GitHub.
Likes
0
Views
20