LiDAR-Based Steering Angle Prediction

Hakan İspir



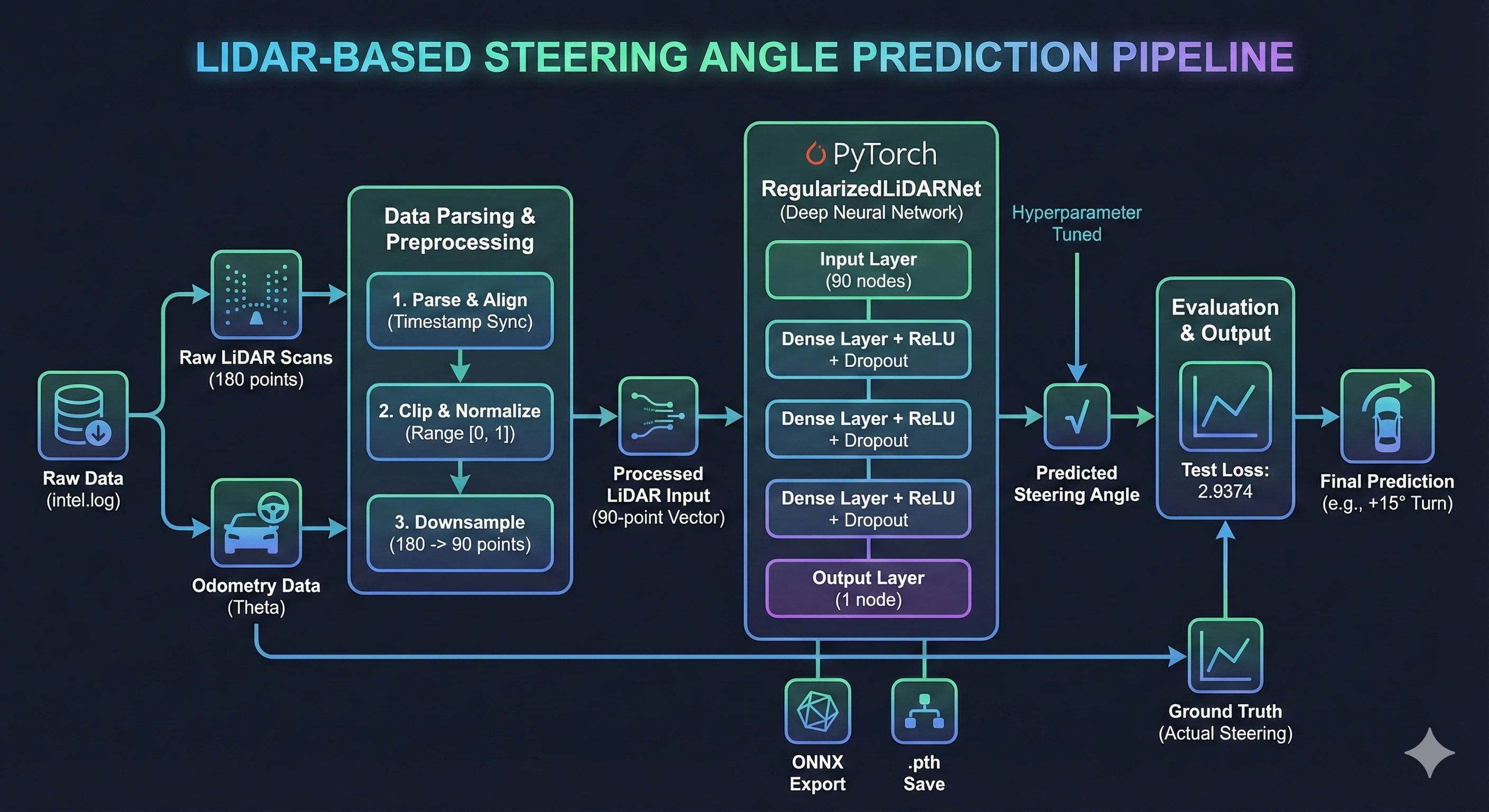
Pipeline Flowchart (Nano Banana)
LiDAR-Based Steering Angle Prediction
The Challenge
Autonomous vehicles rely on sensor fusion to navigate. The objective was to build a system that could predict precise steering angles solely from raw 2D LiDAR laser scans, without visual camera data.
The Solution
I engineered a deep neural network (RegularizedLiDARNet) capable of mapping noisy sensor inputs to vehicle control commands using the MIT-Intel dataset.
Overview
This project demonstrates the use of a deep neural network to predict a vehicle's steering angle based solely on raw LiDAR sensor data. The model is built with PyTorch and trained on the challenging MIT-Intel dataset, which contains synchronized odometry and laser scan information from a mobile robot.
The core of this project involves parsing raw sensor logs, aligning time-series data, preprocessing LiDAR scans, and training a regularized neural network to learn the complex relationship between environmental perception and vehicle movement.
🚀 Core Achievement: Successfully trained a model to predict steering commands from 2D LiDAR scans, a fundamental task in autonomous navigation.
Features
Data Parsing: A custom parser to extract and synchronize odometry and LiDAR data from the raw
intel.log file.Data Preprocessing: LiDAR data is normalized and downsampled to create a concise and effective input for the neural network.
PyTorch Model: A
RegularizedLiDARNet model featuring multiple linear layers, ReLU activations, and Dropout for regularization to prevent overfitting.Hyperparameter Tuning: A systematic grid search was performed to find the optimal learning rate, batch size, and dropout rate for the best model performance.
Model Export: The final trained model is provided in both PyTorch (
.pth) and ONNX (.onnx) formats for cross-platform compatibility and optimized inference.Tech Stack & Dependencies
This project is built primarily in Python and relies on the following libraries:
Core Libraries:
numpy: For numerical operations and data manipulation.torch: For building and training the neural network.scikit-learn: For splitting the data into training and testing sets.Data Parsing & Visualization:
matplotlib: For visualizing the results.(Optional) For ONNX Model Inference:
onnx: To work with the exported ONNX model.onnxruntime: For running inference with the ONNX model.You can install the primary dependencies with pip:
pip install numpy torch scikit-learn matplotlib
Project Structure
data/
intel.log # The raw MIT-Intel dataset log file
mit-intel-ds.ipynb # Jupyter Notebook with the full data processing and training pipeline
lidar_model.pth # The final trained PyTorch model weights
final_lidar_model.onnx # The final model exported to ONNX format
How It Works
The process is detailed in the
mit-intel-ds.ipynb notebook and can be summarized in these steps:Parsing: The raw
intel.log file is parsed to separate odometry (x, y, theta) and LiDAR (180 laser scan readings) data streams, each with its own timestamp.Alignment: The two data streams are aligned based on their timestamps to ensure that each LiDAR scan is matched with the correct steering angle (theta) from the odometry data.
Preprocessing: To make the data suitable for the model, the LiDAR scans are processed by:
Clipping the range to a maximum of 10.0 meters.
Normalizing the distances to a range of [0, 1].
Downsampling the 180 points to a more manageable 90 points.
Training: The processed LiDAR data (input) and the corresponding steering angles (output) are used to train the
RegularizedLiDARNet. A hyperparameter search was conducted to find the best model configuration, resulting in a final test loss of 2.9374.Evaluation: The model's predictions on the test set are plotted against the true steering angles to visually assess its performance.
Like this project
Posted Dec 12, 2025
Deep learning model predicting autonomous vehicle steering angles using raw LiDAR data (MIT-Intel Dataset). Built with PyTorch & ONNX.
Likes
0
Views
1