Muhammad Usman
Solid Work,Web Development,Graphic Designer,Video Editing
New to Contra
Muhammad is building their profile!

video editing project
1. Visual Content
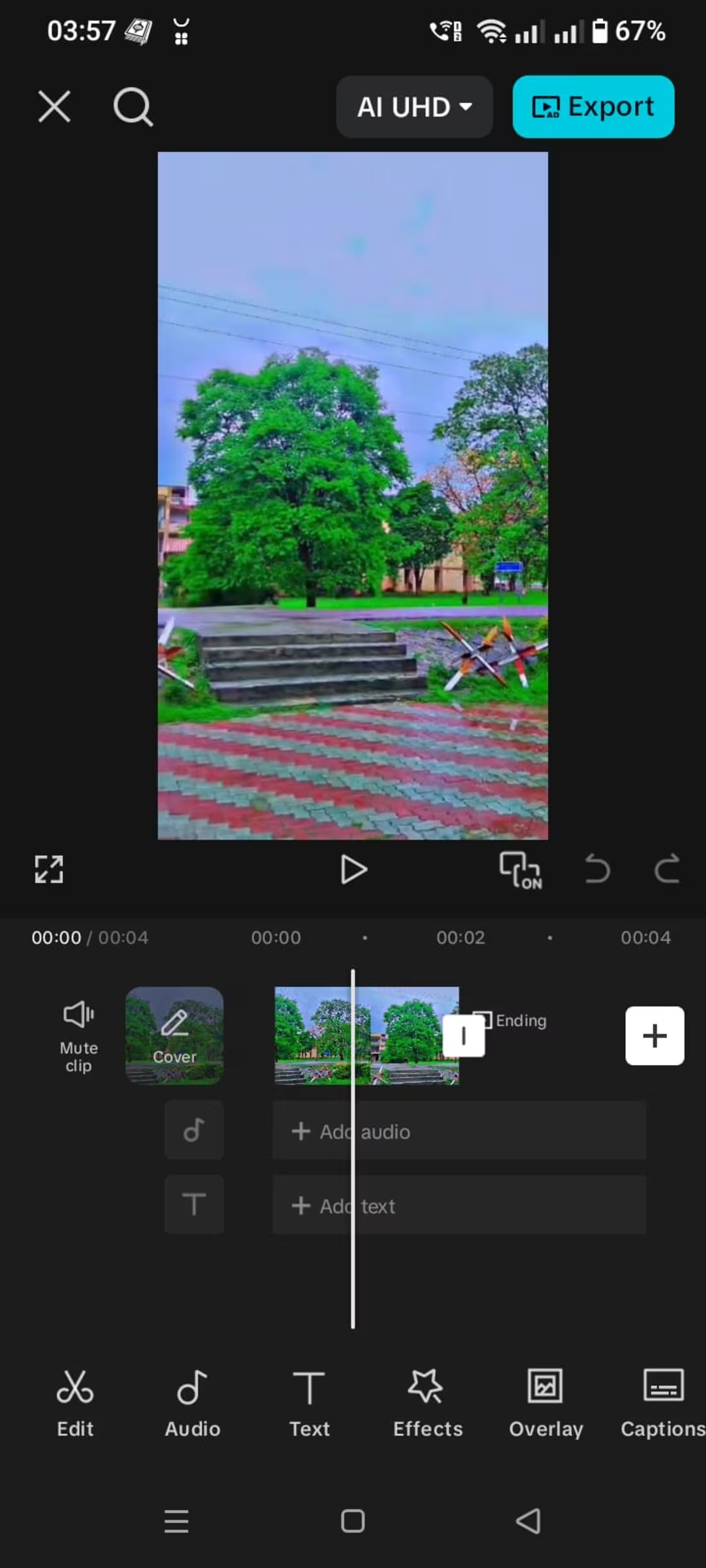
Subject: The video features a lush, green outdoor landscape, likely a campus or park (specifically showing a large tree, stone steps, and a patterned brick walkway).
Location Hint: Based on the surroundings and the previous context of your other projects, this is likely footage from the University of Engineering and Technology (UET) Taxila campus.
Visual Style: The colors appear highly saturated and vibrant, suggesting that a color grade or filter has already been applied to make the greens and blues pop.
2. Timeline & Structure
Duration: The project is very short, totaling exactly 04 seconds.
Clip Arrangement: The timeline shows a single primary video clip that has been split or trimmed. There is a "transition" icon (the white box with a vertical line) between the two segments, indicating a smooth visual effect is being used to connect them.
Ending: The standard "CapCut" ending watermark is visible at the end of the timeline, which editors usually delete or replace before exporting.
3. Editing Status
Export Settings: The user has selected "AI UHD" for the export resolution, which indicates a high-quality output intended for crisp playback on high-definition screens.
Tools in Use: The bottom toolbar shows that no audio or text has been added to the timeline yet. The focus seems to be on the visual rhythm and transitions at this stage.
0
7
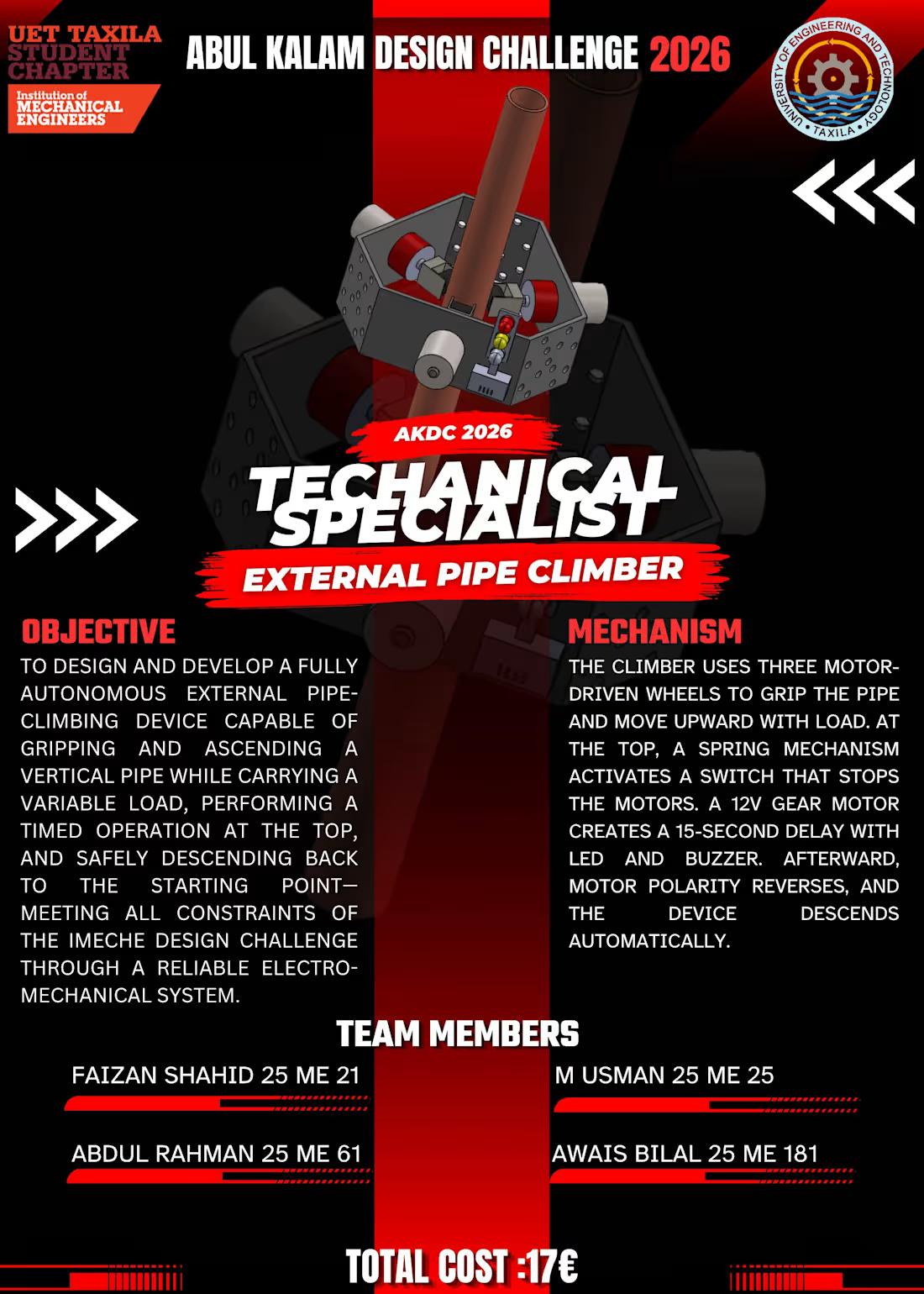
"External Pipe Climber"
🚀 Project Overview
The project involves the creation of a fully autonomous robotic device engineered to navigate the exterior of vertical piping. It represents a classic challenge in mechatronics, combining mechanical grip with electronic control logic.
1. Primary Objective
The goal is to design a reliable electromechanical system that can:
Grip and Ascend: Climb a vertical pipe while carrying a variable load.
Execute Logic: Perform a timed operation at the peak of the climb.
Safe Descent: Return to the starting point automatically after the task is complete.
2. The Mechanism
The climber operates using a specific sequence of mechanical and electronic actions:
Drive System: It utilizes three motor-driven wheels arranged in a tri-axial configuration to ensure a constant grip on the cylindrical surface.
Power: The system is powered by a 12V gear motor, which provides the necessary torque to lift both the robot and its payload.
Automation Logic: * Once it reaches the top, a spring mechanism hits a limit switch to cut motor power.
A 15-second delay is triggered, accompanied by visual (LED) and audible (Buzzer) signals.
The motor polarity reverses automatically, allowing the device to descend.
0
9
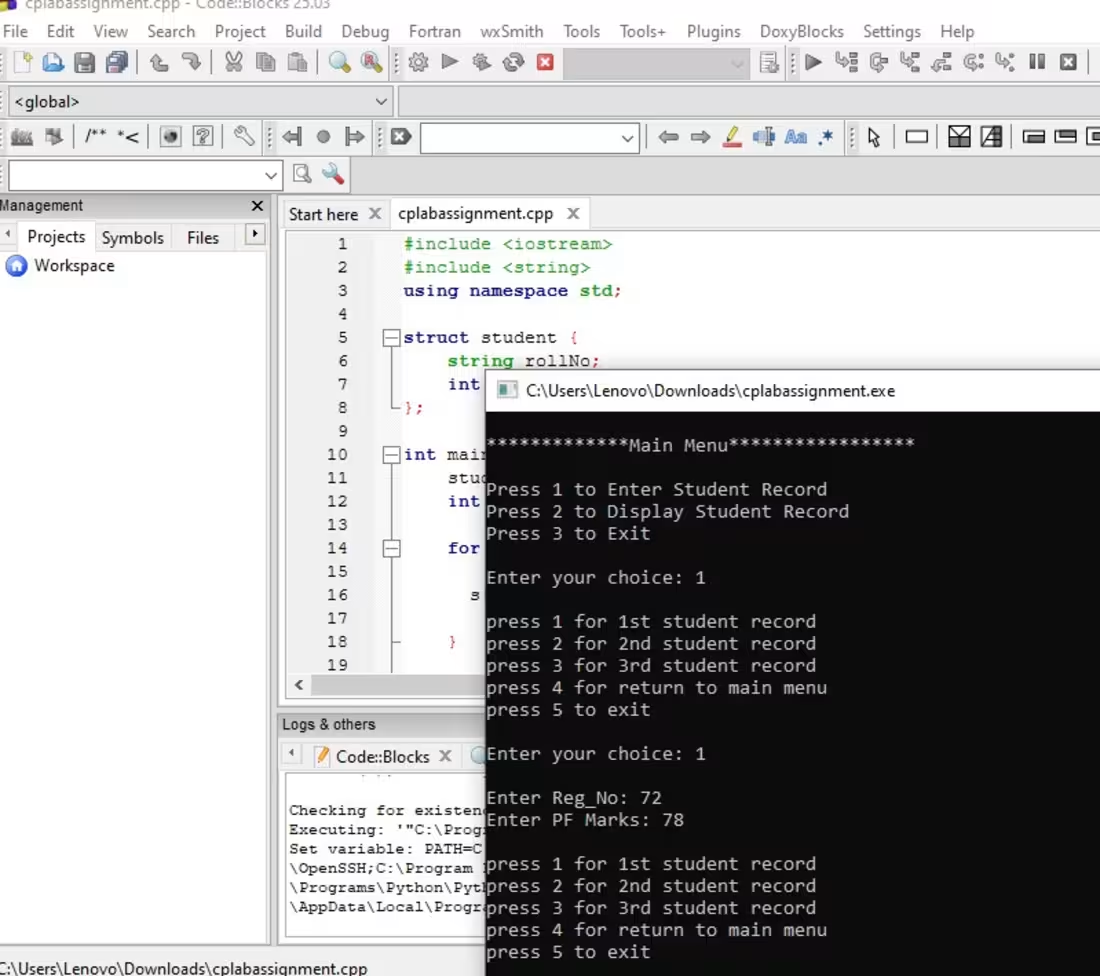
C++ Student Record Management System
1. Core Structure
Language: C++
Data Organization: The project uses a struct named student (visible on line 5) to group related data. Based on the code and console output, this structure includes:
string rollNo; (or Reg_No) to identify the student.
int marks; (specifically "PF Marks" as seen in the terminal).
IDE: Code::Blocks 25.03, running on Windows.
2. User Interface (Console Menu)
The program features a nested menu system, which makes it user-friendly for a command-line tool:
Main Menu:
Enter Student Record
Display Student Record
Exit
Sub-Menu (Data Entry): Once the user selects "Enter Student Record," they are prompted to choose which specific slot (1st, 2nd, or 3rd record) they wish to populate. This suggests the program uses an array of structures to hold multiple student entries.
3. Program Logic & Workflow
Input Handling: The program uses cin to capture user choices and student details like Registration Number and Programming Fundamentals (PF) marks.
Control Flow: The project likely utilizes a switch statement or a series of if-else blocks inside a while loop to keep the program running until the user chooses to exit.
Data Storage: Currently, the data appears to be stored in volatile memory (RAM). This means the records will persist while the program is running but will be lost once the .exe is closed, unless file handling (fstream) is implemented later.
4. Current State
The console shows a successful execution where the user has:
Navigated to the entry menu.
Selected the "1st student record."
Successfully entered Reg_No: 72 and PF Marks: 78.
The program then looped back to the sub-menu, showing it is ready for the next input.
0
13
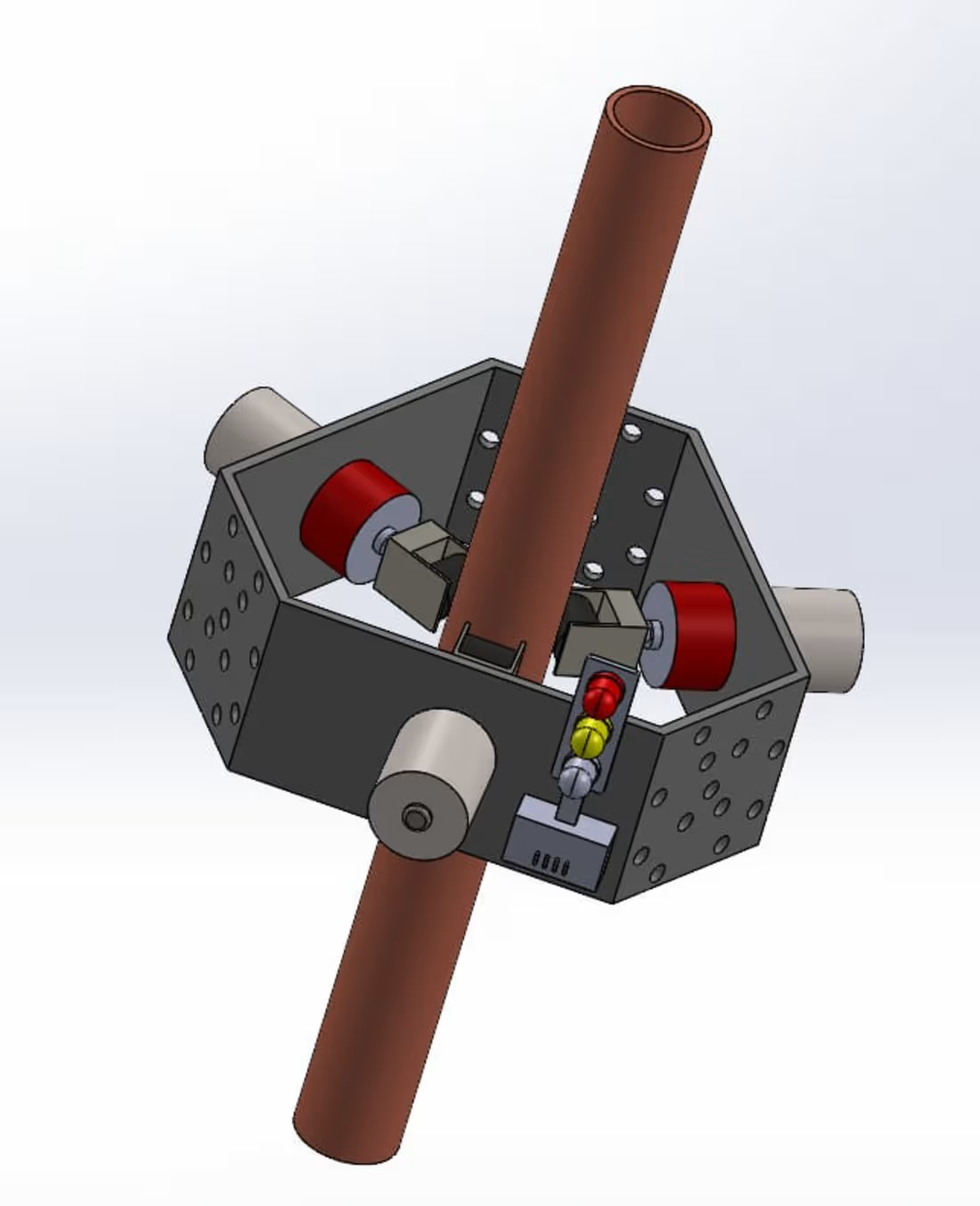
Pipe or Pipe-Climbing Robot
1. Central Frame
Shape: A hexagonal prism outer frame made of what looks like sheet metal or machined plates.
Perforations: The outer faces feature a series of holes, likely intended for weight reduction or to provide mounting points for additional sensors and hardware.
2. Locomotion System
Drive Motors: There are three prominent cylindrical motor housings (gray) mounted externally on alternating faces of the hexagon.
Omni-wheels / Rollers: Inside the frame, you can see red rollers (likely high-friction polyurethane or rubber) that press against the pipe.
Contact Points: The design uses a tri-axial arrangement. By placing rollers at $120^\circ$ intervals around the pipe, the robot achieves a self-centering effect, ensuring it stays stable as it moves along the longitudinal axis.
3. Payload and Electronics
Sensor Stack: On the front-facing panel, there is a small vertical stack of colored components (red, yellow, and silver). This resembles a status indicator (LED stack) or a specialized sensor array (like ultrasonic or infrared) for distance sensing.
Control Box: Below the indicators sits a small gray rectangular box, which likely represents the onboard microcontroller or a battery housing.
4. Functional Application
Given the way the rollers "grip" the central brown pipe, this model is likely designed for:
Pipe Inspection: Moving along the exterior of a pipe to check for corrosion or leaks.
Automated Painting/Cleaning: Traversing the pipe to apply coatings or remove debris.
Vertical Climbing: If the motor torque is sufficient, the tri-wheel grip allows the robot to defy gravity and climb vertical conduits.
0
17