
Eshal Arshad
MechEng student, specializing in Autodesk, Canva and writing
New to Contra
Eshal is ready for their next project!

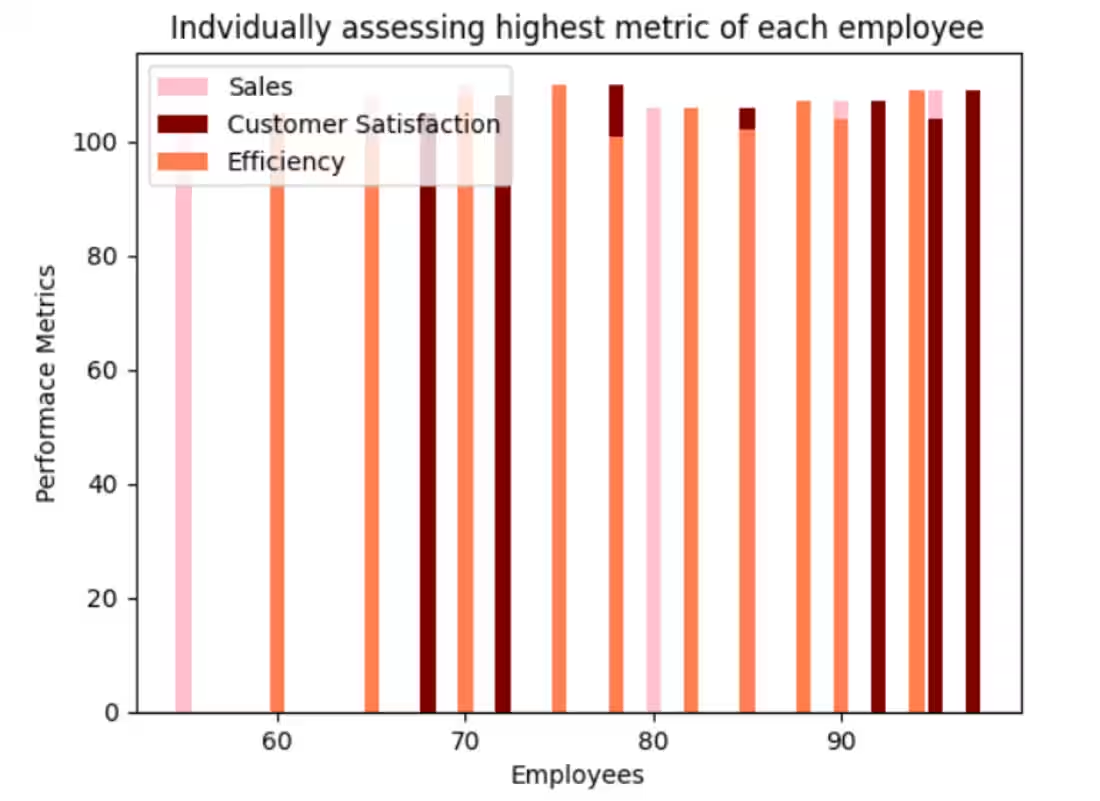
Sample dataset was used, and python was used to extract data trends, results and correlation between values
0
10
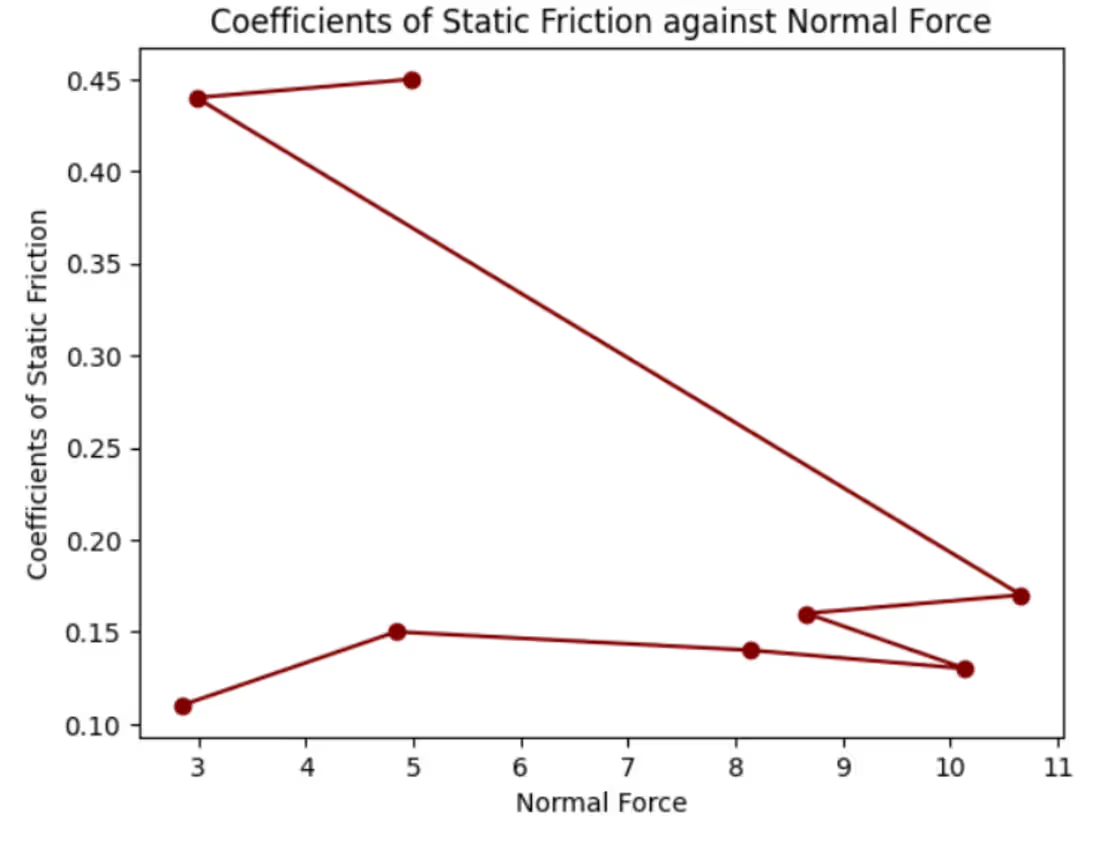
used python for graphing
0
15
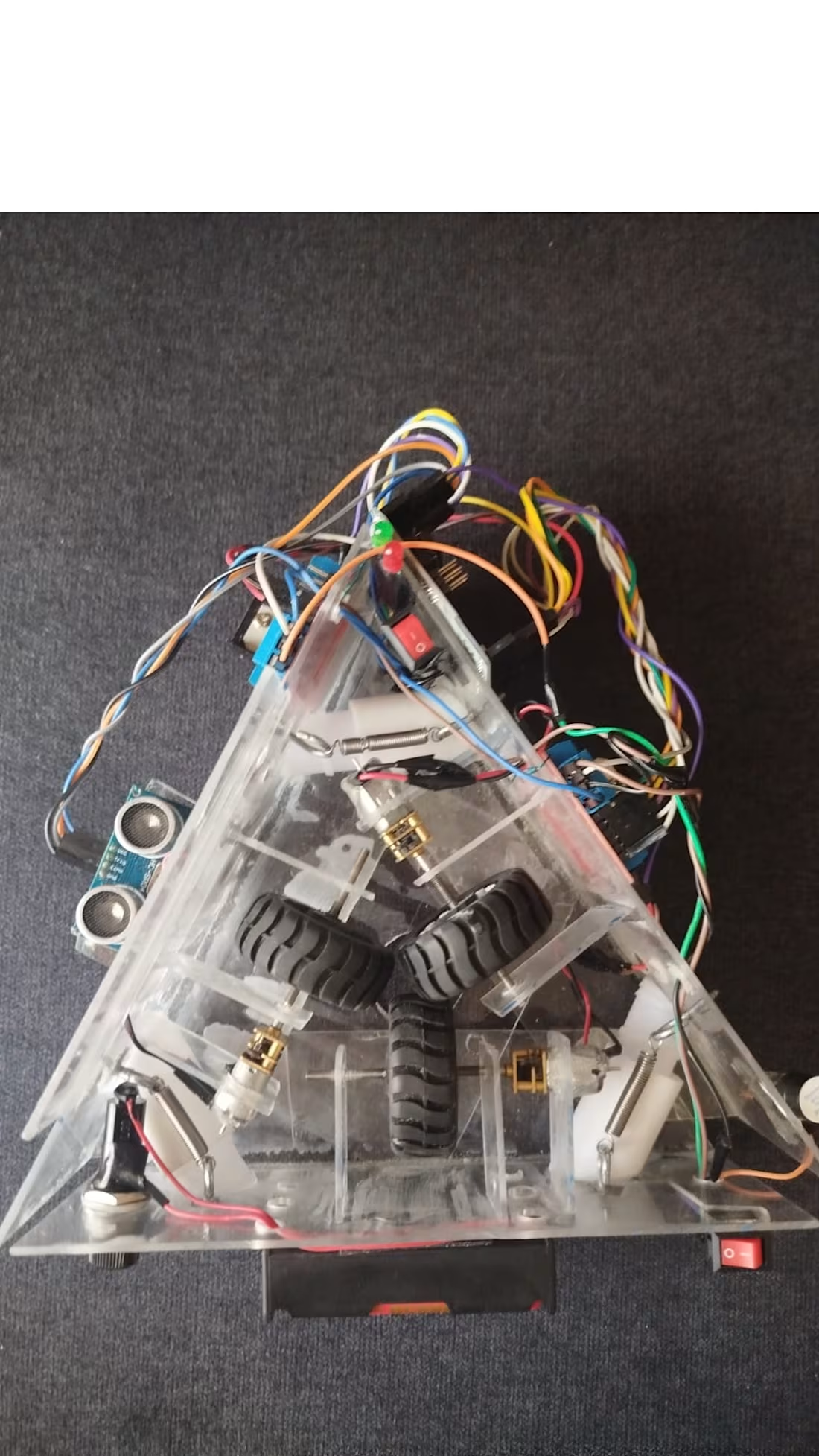
This is an external pole climbing robot, created as a part of a contest designed by IMechE NUST chapter. The robot is a fast, autonomous, stable and lightweight device that completed it 4.4 meter run in a record time of 13secs. The robot required extensive mechanical understanding of the structure, ensuring equal weight distribution, as well as skill regarding efficient circuit construction and programming of Arduino uno.
0
20

جہاد بالمال 🇵🇰🇵🇸 (@jihadbilmaal) • Instagram photos and v…
0
1