Vehicle Violation Detection using Faster R-CNN and SPP-Net
Luis Daniel Pambid
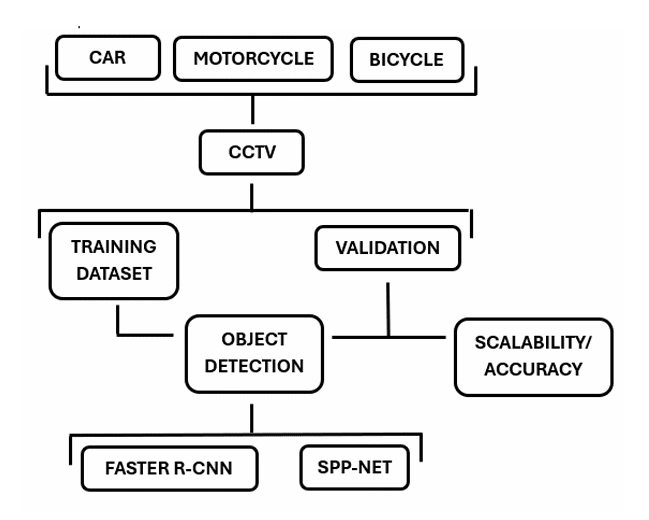
As bicycles increasingly serve as a mode of transportation, there is a growing demand for dedicated bike lanes. However, the emergence of bike lanes as a relatively new traffic infrastructure has led to frequent violations by motorized vehicles, posing challenges for cyclists utilizing these lanes. In light of this, the objectives of this study are as follows: (1) To Identify which of the two algorithms yields the higher accuracy rating (2) To examine each algorithm's scalability with increasing dataset and, (3) To determine which algorithm processes more stably and smoothly based on the speed of the programs.
Like this project
Posted May 26, 2024
The emergence of bike lanes as a relatively new traffic infrastructure has led to frequent violations by motorized vehicles, posing challenges for cyclists.
Likes
0
Views
7