Benchmark Script for FastSAM and ORB
Franco Mucco
Script di benchmark per:
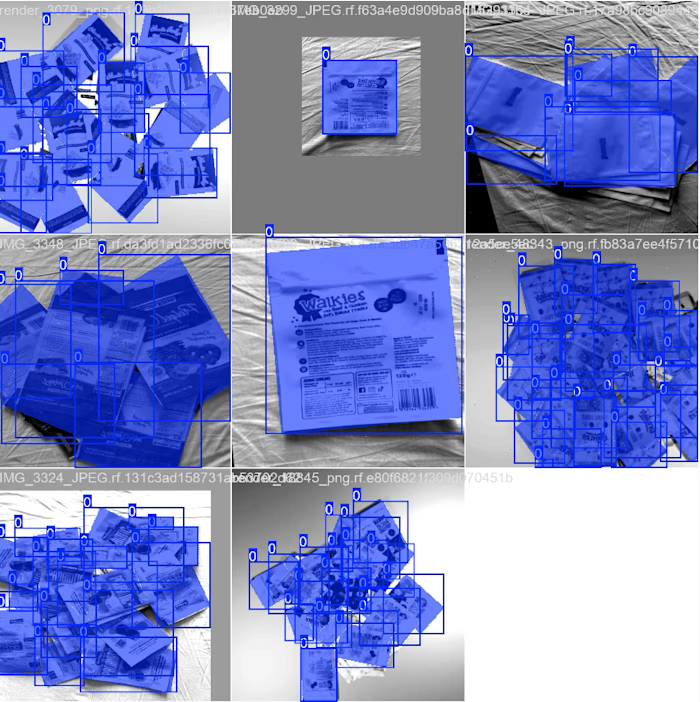
FastSAM-x e FastSAM-s a risoluzioni:
512, 576, 640, 704, 768, 832, 896, 960, 1024 su 8 immagini statiche.ORB (OpenCV) con sweep di combinazioni parametriche, misurando latenza, #keypoint e keypoints/ms.
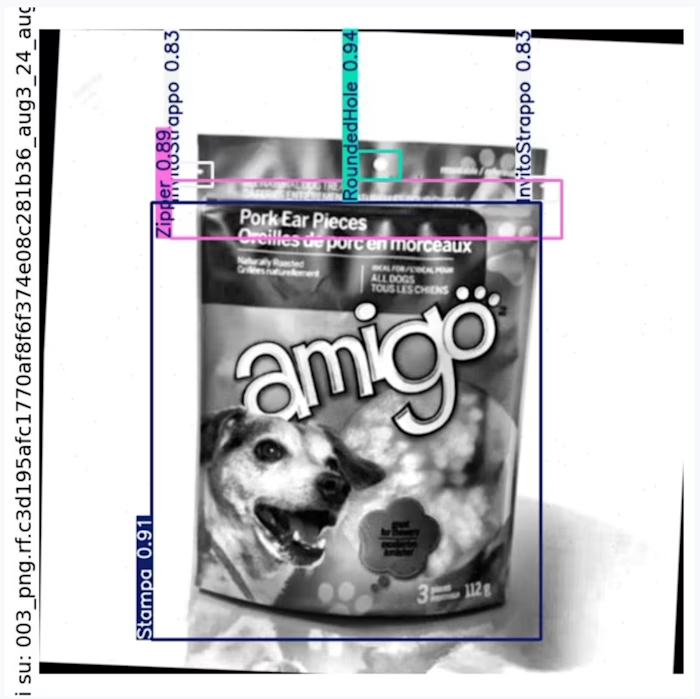
ORB per Pose estimation e Orientamento stima orientamento e angolo di immagini ruotate di 45 gradi (front/back) + angolo usando due reference:
• Coop_fronte_texture_fronte.png (front)
• Coop_retro_texture_retro.png (back)
Output: CSV con i tempi e risultati.
Indice
Requisiti
Python 3.9 – 3.11 (consigliato 3.10 per massima compatibilità).
PyTorch installato correttamente per la tua piattaforma (CPU/CUDA/macOS Metal).
Connessione internet se i pesi non sono presenti localmente (lo script li scarica in automatico).
Lo script seleziona automaticamente il device: CUDA → MPS (macOS) → CPU.
Piattaforme supportate
Windows 10/11 (x64)
macOS (Intel e Apple Silicon M1/M2/M3)
Linux (x64)
NVIDIA Jetson (Nano/Orin/Xavier) — vedi sezione dedicata
Setup ambiente
Linux / macOS
Windows (PowerShell)
Installazione PyTorch
Scegli la build corretta (usa anche la guida su https://pytorch.org/get-started/locally/).
CPU only:
CUDA 12.4 (GPU NVIDIA):
macOS (Apple Silicon / Metal):
Su Jetson NON usare questi comandi generici: vedi la sezione Uso su Jetson.
Installazione dipendenze
Se su Linux/Jetson hai conflitti con OpenCV di sistema, usa:
Struttura progetto
Uso
Esegui senza argomenti:
Device scelto automaticamente (CUDA/MPS/CPU).
Se i pesi non sono presenti, lo script prova a scaricarli (vedi sotto).
Uso su Jetson (Nano/Orin/Xavier)
I dispositivi Jetson hanno RAM/CPU limitate; ecco il percorso consigliato.
1) Ambiente & dipendenze
2) PyTorch per Jetson
Installa la ruota compatibile con la tua versione di JetPack/CUDA (gli URL cambiano nel tempo: verifica sul forum NVIDIA “PyTorch for Jetson”).
Esempio — JetPack 4.6.1, Python 3.8:
Esempio — JetPack 5.1, Python 3.8:
Ottimizzazioni & consigli
Chiudi applicazioni in background durante i test.
Mantieni la macchina “in idle” per risultati più stabili.
Aumenta
repeats (es. 10) se vuoi statistiche più affidabili (su Jetson, attenzione ai tempi).Per confronti, usa sempre le stesse 3 immagini e stesse risoluzioni.
Troubleshooting
ImportError: fastsam → pip install "git+https://github.com/CASIA-IVA-Lab/FastSAM.git"CUDA non rilevata → verifica driver (
nvidia-smi su PC, tegrastats su Jetson); in fallback lo script userà CPU/MPSOpenCV in conflitto (Linux/Jetson) →
pip install opencv-python-headlessPesi non scaricati → scarica manualmente
FastSAM-x.pt / FastSAM-s.pt e mettili accanto allo scriptRAM insufficiente → usa solo
FastSAM-s.pt, riduci risoluzioni e repeatsLike this project
Posted Sep 17, 2025
Created benchmark script for FastSAM and ORB with CSV output.
Likes
0
Views
4
Timeline
Mar 4, 2025 - Ongoing