ROV (Underwater Remotely Operated Vehicle) 2022
Dyab

A remotely operated underwater vehicle, or ROV, can explore the underwater environment while the pilot is comfortably on land. Humanity's ability to study and work in the oceans is constrained without ROVs. Because divers rarely go deeper, human-carrying submarines are expensive and uncommon.
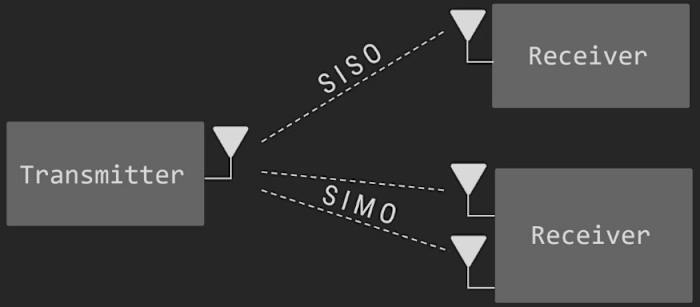
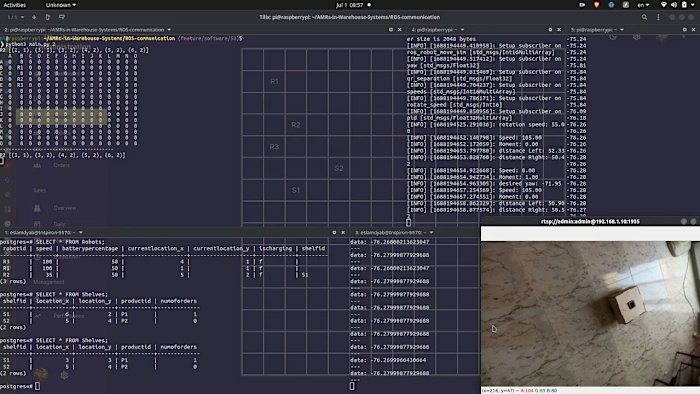
My role was Designing the digital cameras system starting from handling the streaming pipelines in the bottom side (Raspberypi) to viewing the stream in the top side (monitor) over Ethernet, developing embedded micro-controller code (C++) with ROS to get readings of different sensors, and image processing & AI like figuring out the length of an object underwater by calibrating a stereo camera and performing some computations to extract the length feature.
Project website:
Like this project
Posted Feb 29, 2024
A remotely operated underwater vehicle, or ROV, can explore the underwater environment while the pilot is comfortably on land.