
Amirhosein Mohaddesi
Clear, rigorous problem-solving in AI and robotics
Ready for work
Amirhosein is ready for their next project!
Alter Ego is a personalized AI assistant I built and deployed on my website using OpenAI’s ChatGPT. It’s designed to represent how I think and work, not just answer questions. The system uses a structured persona, curated knowledge from my research and projects, and context-aware prompting to hold accurate, grounded conversations about my background in AI, robotics, and agentic systems. The goal is not imitation for novelty, but continuity: enabling clear, truthful interaction with my work, ideas, and problem-solving approach even when I’m not present.
Please check out the demo on my website:
https://amirmohaddesi.github.io/
23
190
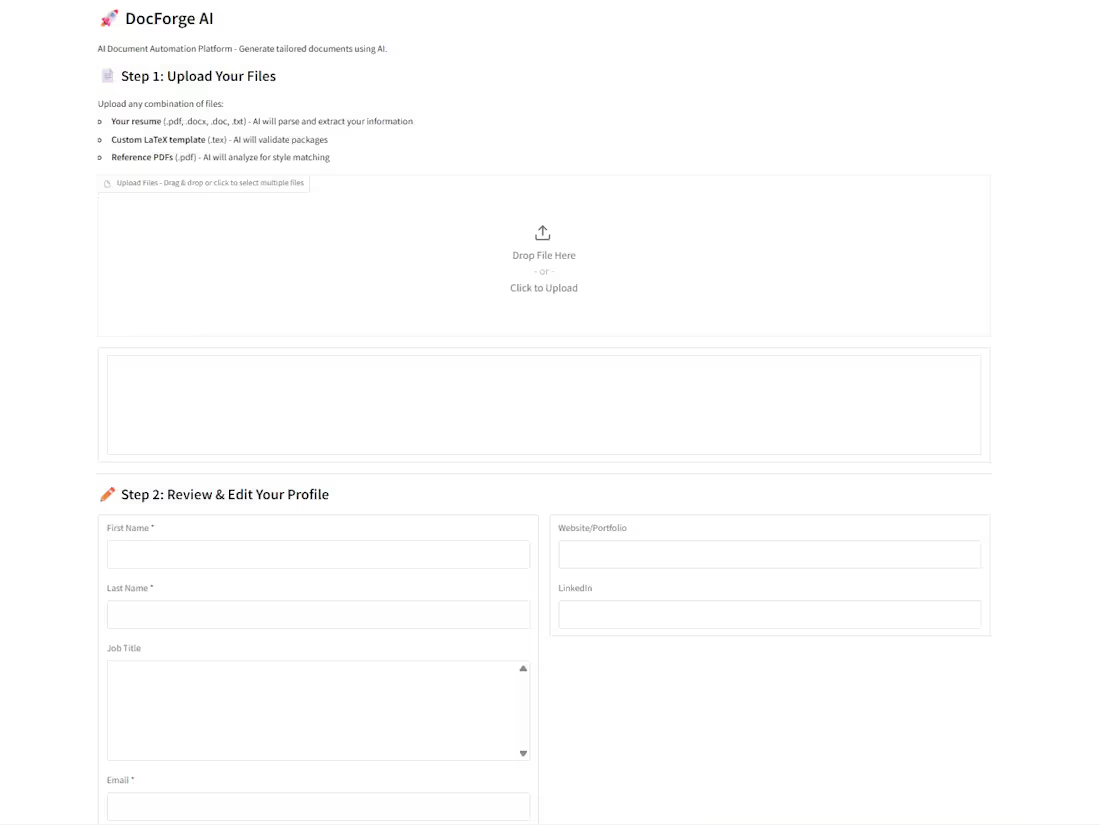
DocForge AI is a document automation system that uses Large Language Models as reasoning engines, not just text generators. Instead of simply “writing” documents, the system analyzes structure, constraints, and intent to produce professional, publish-ready outputs such as resumes, SOC 2 reports, technical specifications, and compliance documents. LLMs are orchestrated to plan sections, enforce schemas, validate consistency, and adapt tone and layout to industry standards. The result is documents that are not only well-written, but correct, coherent, and visually polished, reducing manual effort while maintaining trust and professional quality.
17
198
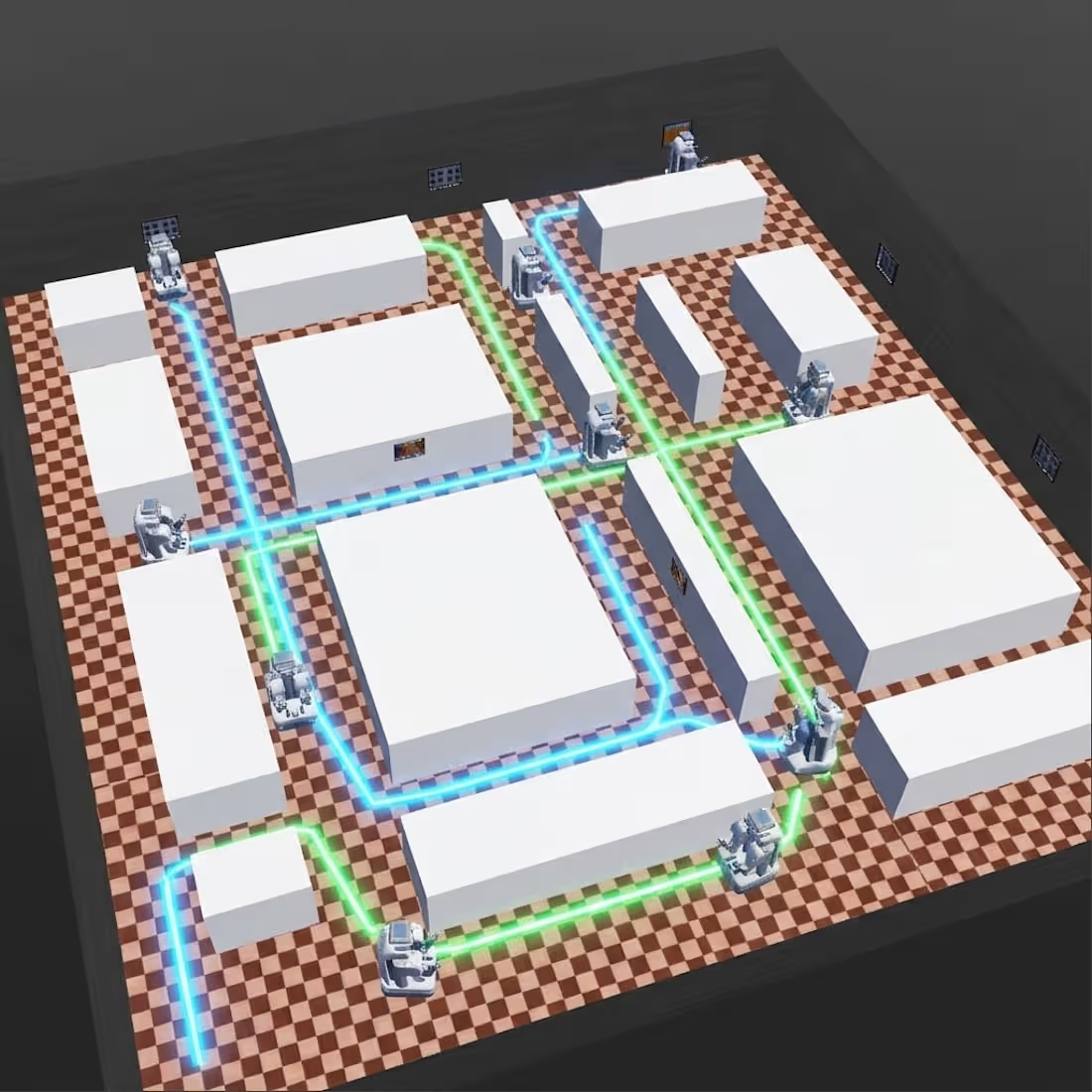
I built and studied a multi-robot coordination system in Webots to understand how different navigation strategies affect team performance in exploration tasks. Using Clearpath PR2 robots, I implemented and compared Route, Survey, and Mixed human-inspired strategies, along with obstacle avoidance and conflict resolution in C++. By running controlled simulations, I measured how strategy choice impacts task completion time, coverage, and coordination efficiency. One key result was that mixed strategies consistently produced more robust and efficient teams, offering insights directly relevant to real-world search, rescue, and exploration robotics.
11
128
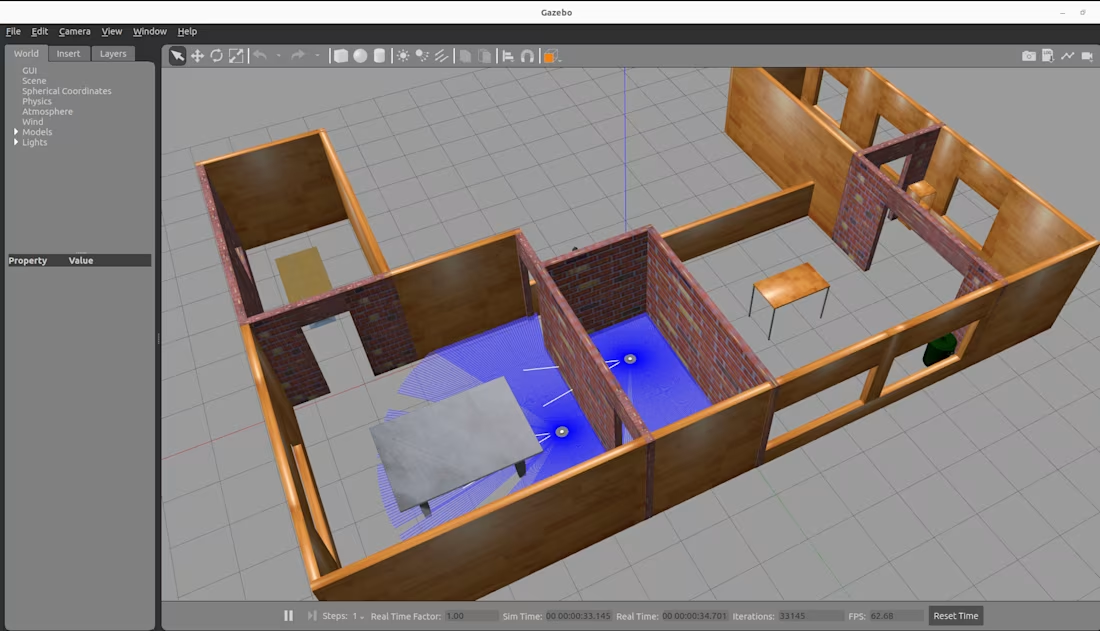
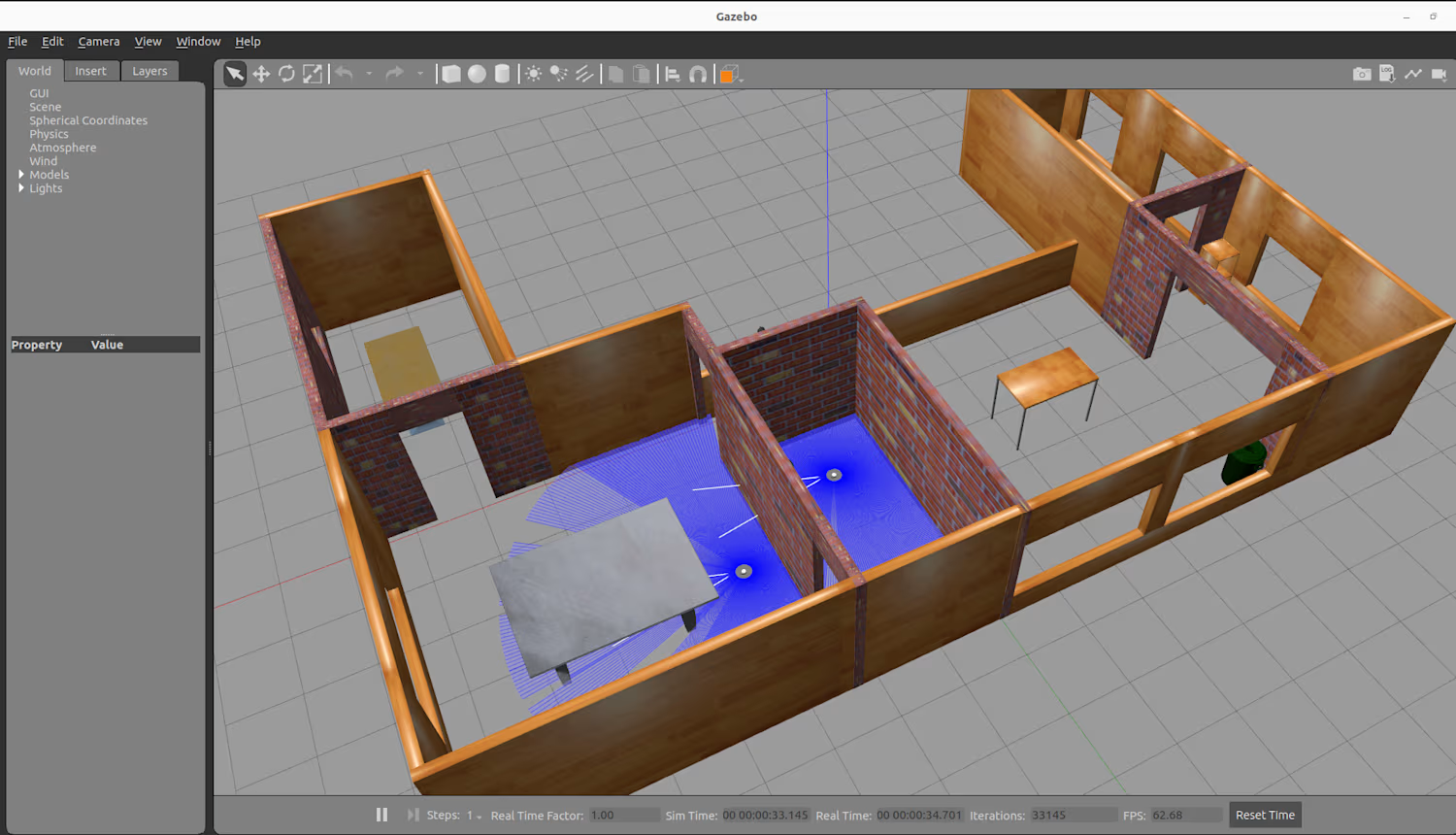
Multi-Robot Coordination & Simulation in ROS2
Designed and implemented a ROS2-based multi-robot simulation platform to study coordination, navigation strategies, and communication-aware exploration.
Integrated SLAM Toolbox, Nav2, map merging, and multi-agent coordination logic. Used Python and C++ nodes with live visualization in RViz to evaluate efficiency, coverage, and cooperation under different strategies.🚀
21
219