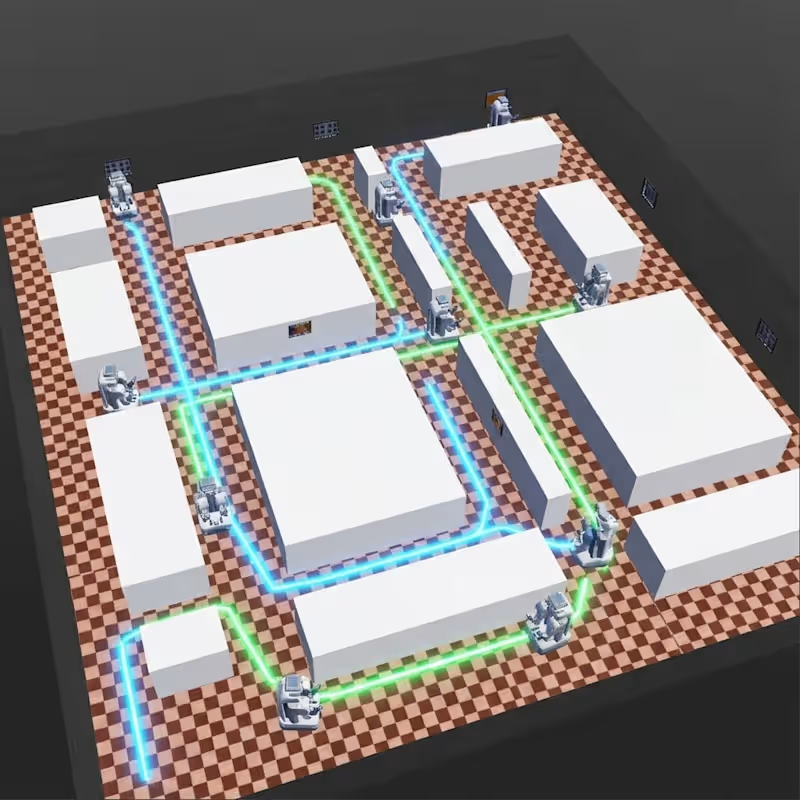
Freelancers using OpenCV in San FranciscoFreelancers using OpenCV in San FranciscoI built and studied a multi-robot coordination system in Webots to understand how different navigation strategies affect team performance in exploration tasks. Using Clearpath PR2 robots, I implemented and compared Route, Survey, and Mixed human-inspired strategies, along with obstacle avoidance and conflict resolution in C++. By running controlled simulations, I measured how strategy choice impacts task completion time, coverage, and coordination efficiency. One key result was that mixed strategies consistently produced more robust and efficient teams, offering insights directly relevant to real-world search, rescue, and exploration robotics.