
Akshay Parseja
Java/Python Developer with Cloud Expertise
Ready for work
Akshay is ready for their next project!

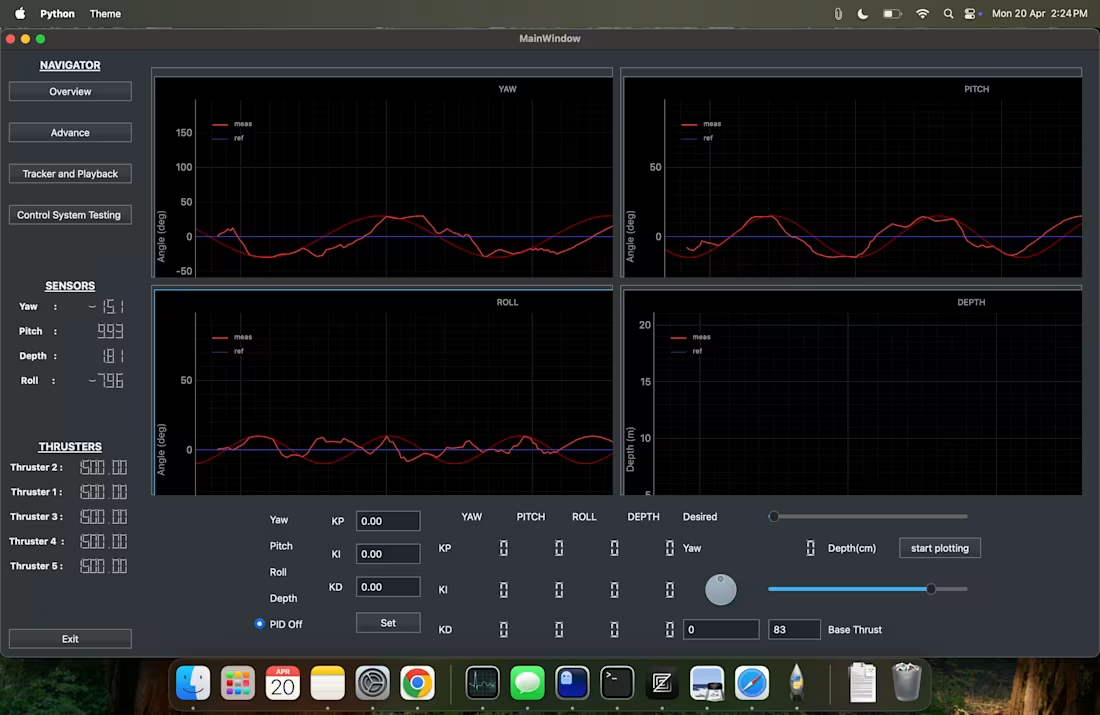
Trident AUV(autonomous underwater vehicle) GUI is a desktop operator dashboard that connects to an AUV telemetry source and provides live monitoring, control, and visualization of the vehicle in real time.
Real‑time status: shows numeric readouts for thrusters, yaw/pitch/roll, and depth so operators see current sensor and actuator values at a glance.
Time‑series visualization: displays smooth, sliding‑window plots for yaw, pitch, roll and depth (configurable smoothing/window) to inspect trends and transient behavior.
3D attitude view: renders a rotating OpenGL vehicle model that mirrors the IMU orientation so users get an immediate visual sense of heading, pitch and roll.
Control surface: exposes thruster sliders, a dial/desired yaw, PID tuning controls and mode selection (manual / semi‑auto / auto), allowing operators to send commands and tune behavior during tests.
Primary uses: live mission monitoring and operator control during bench tests, debugging and tuning vehicle behavior (PID & thrusters), post‑test review with plotted telemetry, and creating demo/screenshot artifacts for reporting.
1
100
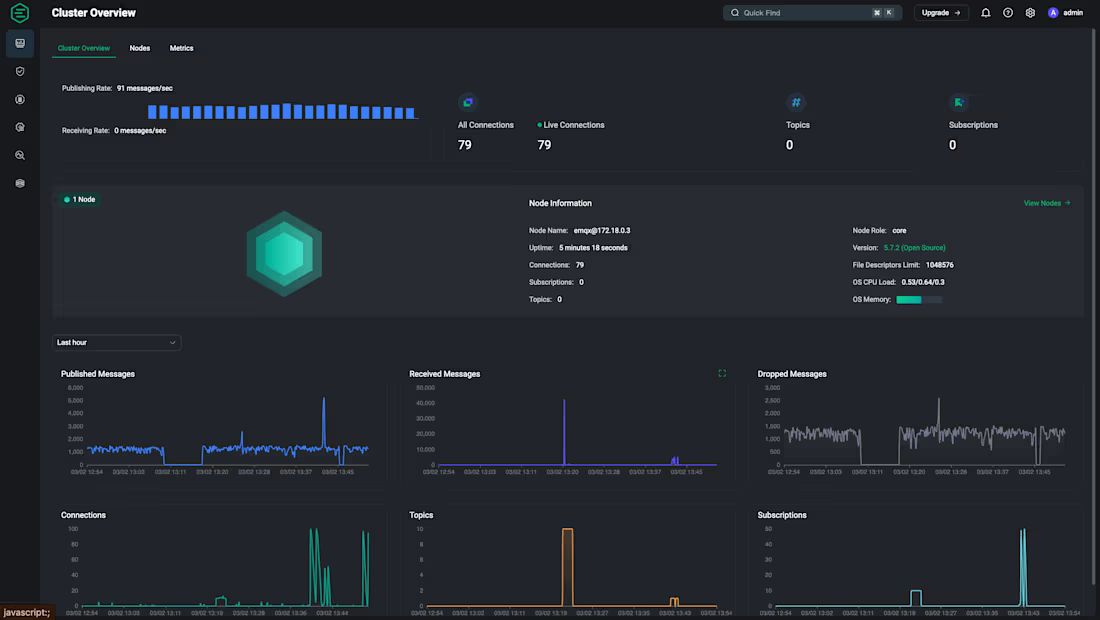
AegisGate is an asynchronous, high-performance MQTT proxy built in Rust, designed to protect downstream IoT brokers (like EMQX) from malicious actors and traffic surges.
Acting as a secure perimeter, it performs deep packet inspection, strict protocol validation, and per-IP rate limiting before allowing connections to pass through to the broker. This ensures that only authorized, well-formed machine data reaches the infrastructure, preventing DDoS attacks and resource exhaustion while maintaining zero-copy, high-concurrency I/O via the Tokio runtime.
2
137

Vehicle Data Pipeline
1
19
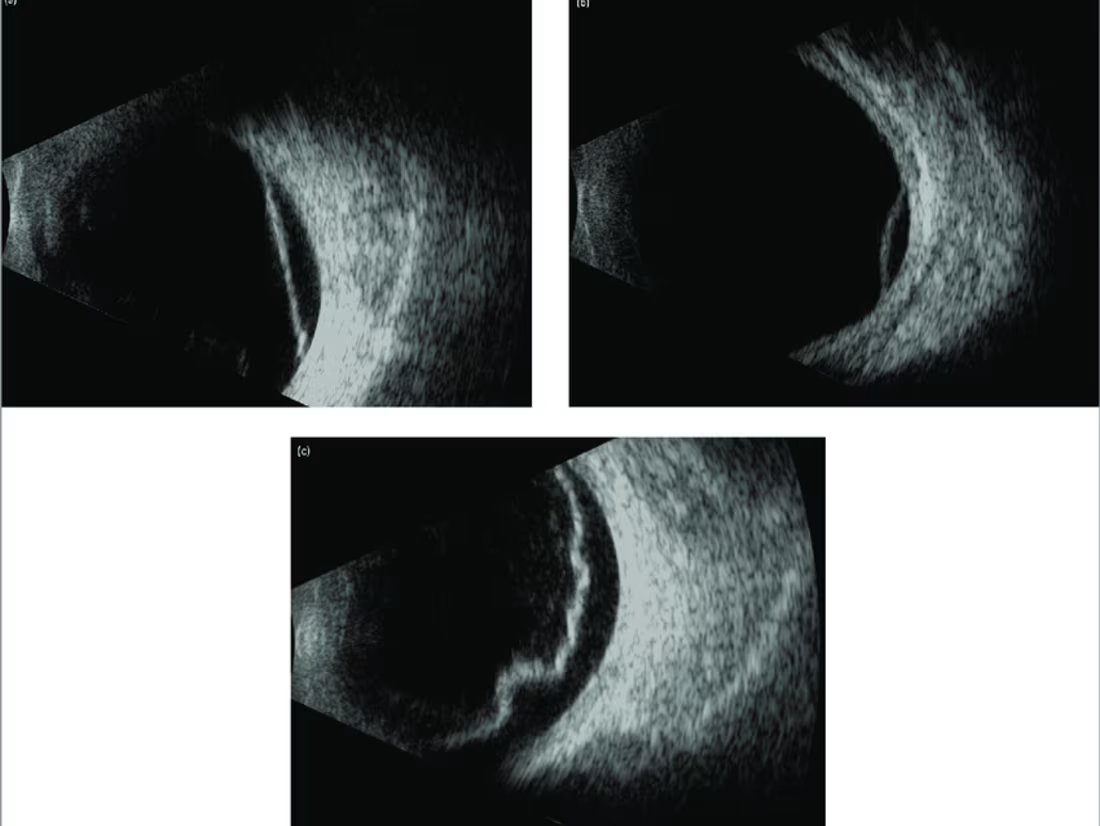
Medical Application Development Using Qt/QML and C++
1
5